














搜索

作品简介: 本文通过对地铁列车在站停靠时间相关影响因素的观测和分析,建立停靠时间模型,并利用所建模型,提出一套预测地铁在站停靠时间的方法,以及探究缩短停靠时间的措施,并通过仿真,证明措施的有效性。
作品简介: 作品名称:高精度电磁阀动作时间测试装置 学科类别:科技发明制作A类 作者学历:本科
作品简介: 本输电线路防绕击避雷针可用于输电线路防雷保护领域,主要提高避雷线的引雷能力,增强其屏蔽能力,降低雷绕击概率,减少雷击跳闸事故的发生,从而增强输电线路运行的稳定性。
作品简介: TLMEL900.16-40-8型提梁机用于高速铁路客运专线预制梁场双线混凝土预制箱梁在制梁台座、存梁台座间进行挪移;从存梁台座提梁,吊运至运梁车行进路线上,为运梁车装载箱梁。长期以来,包括提梁机在内的高铁建设运、架、提设备及关键技术主要依靠进口,为突破国外的技术垄断,我们为秦皇岛通联重工有限公司(现已更名为秦皇岛天业通联重工股份有限公司)研制了TLMEL900.16-40-8型提梁机,实...
作品简介: 井下救生机械手适用于各类坠井事件的井下无人救助,尤其是口径小、深度大、空气稀薄,救援人员不便或无法进入施救的情况。该装置由蛇形机械手、机械手联动装置、前端信息反馈装置、单向可折叠式探杆、井上收放及平动装置、监视控制终端等部分组成。其主要工作过程是根据前端信息反馈,控制蛇形机械手带动救生绳寻隙而行地环绕被困者一周,完成救生绳索安全搭扣后,启动井上收放装置提升被救者,实现救助。

作品简介: 我国是猪肉消费大国,母猪饲养行业却相对落后,大中型养猪场多采用定位栏等纯机械饲养设备,自动化程度低、人工影响因素大,极大地限制了母猪的生产效率。基于RFID的自动化母猪饲养系统目的在于构建高效率的自动化、信息化养猪模式和全新的饲养理念,消除传统饲养模式的弊端,提高养猪场的生产效益和经济效益,推进养猪业的现代化进程。 该系统对母猪进行个体识别,全面跟踪记录母猪的饮食、体况、发情等生...
作品简介: 我国水利水电、交通领域中有大量隧道工程,隧道工程地质灾害是制约隧道施工的关键因素,往往由于隧道前方地质情况不明,经常出现无法预料的地质灾害,如突水、突泥、坍塌、岩爆和有害气体等。灾害一旦发生,轻则冲毁机具,淹没隧道,正常施工被迫中断;重则造成重大的人员伤亡,产生巨大的经济损失,甚至有些地下工程会因此而被迫停建或改线。所以开展超前预报显得尤其重要。 本项目在指导老师的带领下,通过大量调研...

作品简介: 本项目根据市场需求设计一台筷子清洗消毒烘干排序整理机,本机集清洗模块,消毒模块,烘干模块,排序模块,整理模块等多功能模块一体化的自动化产品。经过浸泡的筷子能在本机中自动化实现清洗,消毒,烘干,排序,整理等多道工序。根据试验结果显示,本机的各功能模块基本上符合设计要求,其中在整理模块的筷子大小头排序成功率在99%以上。本机的工作效率为20分钟清洗600双筷子,平均每秒为1根筷子。物料(筷子)规...

作品简介: 交通量预测是城市交通规划、道路交通管理和道路可行性研究的基础和前提,交通量预测是否科学和符合实际,将直接影响到方案的综合效益。传统的交通预测方法均是以大量的调查数据为基础,基年OD的调查往往花费大量的时间、人力和物力,而面对基础数据不完备的新城区时,传统的交通预测方法更难以奏效。文章以新城区为研究对象,在总结分析已有的研究成果的基础上,对比分析新、老城区在交通预测上存在的差别,从节省时间、人力和物...
作品简介: 计算全息用于立体显示不仅引起了三维显示学术界研究热潮,而且也得到了光电子相关产业的广泛关注。 大面积计算全息图的快速输出,一直是学术界以及产业界面临的共同难题。针对传统计算全息图输出设备的应用局限性,我们结合计算机和光电技术,研制了一台计算全息图自动输出系统,为计算全息图的快速输出提供必要的设备。

作品简介: 该装置主要用于边防哨所、沙漠、戈壁滩等严重缺水地方的制水,不需要水源,以空气源为取水对象,将空气中的气态水转化为可供人们饮用的液态水,保证极端情况下部队和居民的饮水需求。

作品简介: 本发明作品研发了一种仍依靠光干涉原理,将一部分干涉光经分光棱镜分光转化成数字信号实现光数一体双模式智能瓦斯检测,该新型瓦斯检测仪可随时检测作业场所的瓦斯浓度,数字和光谱同时显示浓度值,保存历史数据供查询与上位机下载,可设定报警值实现声光报警,高度智能化,以适应煤矿安全生产的需要,为我国煤矿安全生产提供保障。

作品简介: 本检测仪采用 DSP处理器(TMS320F2812)为核心,通过分析超声波在混凝土预制板中传播的声速与声压衰减,从而对预制板的性能做出整体评价。它采用无损检测技术,将发射控制、采集滤波、AD转换、FFT运算、分析、显示控制、数据存储、数据通信等功能融为一体,并通过LCD液晶屏将分析结果显示出来,可同时利用上位机对多组数据进行分析。

作品简介: 本作品以清洗用水作为唯一的动力源,利用水射流所产生的负压特性实现机器人在清洗壁面上的吸附,利用水压驱动的活塞附以连杆机构实现机器人的直行、转弯等爬行动作,并利用水浸式超声波去污原理实现壁面的清洗。所研制的机器人因其质量小、可靠性高、供能方式简单等优点,非常适用于高楼外墙清洗,现场试验也证实了该机器人的实用性和可靠性。

作品简介: 我国城市地铁轨道交通现已进入快速发展阶段,在看到市场效益的同时还应看到地铁发展中还存在着较为突出的问题,如运行故障、信号灯失灵等现象时有发生,严重威胁地铁的安全运行。本设计着眼于地铁信号指示环节的改进,运用先进的电磁兼容技术、PWM技术、电流自适应匹配技术,设计一种大功率、拥有智能化故障检测功能的新型地铁交通指示系统,光信号有效传输距离不小于750米,能耗降低70%,整机功耗不大于24VA...

作品简介: 该作品属于垂直轴风力发电机,具有安装维护简单、噪声低、叶片受力稳定等垂直轴风力机的固有优点。特点在于风力机风轮由两个叶片组成,可依据风速风向仪、光电编码器测得的风向、风速、叶轮转速及转角等信号,通过单片机控制每个叶片驱动电机,自动调节各叶片的攻角以获得最大的驱动力矩和发电效率。该系统可以广泛地应用在风力资源较丰富的哨所、岛屿、偏远山区等风力资源较丰富的地区,免除远距离的电线电缆的建设费用,带来...
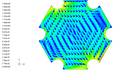
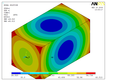
作品简介: 正六边形球面肋板式换热器板片是一种新型板式换热器板片,具有传热系数高、压降小等特点。项目研发以换热器单位压降传热系数和单位质量换热量为优化函数,从机械类工业产品设计理念和相关设计方法切入,对各个设计方案进行逐个数值模拟分析比对,优化得到一种性能优良的正六边形球面肋板式换热器。

作品简介: 在当前反恐、防暴已成为一种新的作战模式,具有很强的特殊性,需要对多种形式目标实施快速、准确火力突击。据武警部队对反恐、防暴案例的统计:移动目标射击达34.3%,隐显目标射击达37.1%,静态目标射击仅为2.2%。研发具有远程遥控、无规律变速曲线运动、快速隐显、自动报靶功能的靶标,是新形势下实弹射击训练的迫切需求。 “实弹射击远程遥控靶标机器人”创新点及技术先进性: 1、采用无线双向通信方式,实...

作品简介: 数控气动爬梯子消防机器人,采用气动作为动力,基于单片机控制,用气缸带动连杆机构,使两幅钩子交替有序抬起、伸出、落下,实现机器人自动沿梯子上下爬动的动作。应用仿生学原理,用机械方式模仿人手爬梯子的动作而设计的,其结构简单,动作可靠,实测表明该控制策略可行、响应快速。这种新型机器人在很多领域有着广泛的应用潜力。
作品简介: 本作品设计制作了仿生UUV模型。模型突破生物的生理局限,采用双尾鳍推进方式,不仅有效抑制了常规尾鳍推进所带来的本体晃动问题,改进了潜航器巡游的稳定性,而且显著提高了推进速度;此外,借鉴飞行动物拍翼的机动灵活之所长,为潜航器研制增设了强化功能的两自由度胸鳍机构,实现了高机动性。该模型的研制成功不仅验证了组合仿生概念的可行性,还初步揭示了其优势,为仿生UUV提供了一条新的发展思路。
