














搜索
作品简介: 该智能机器人的设计实现了安全、实时、准确、高效、可视地探测某一区域的环境参数,并通过无线的方式将采集到的数据传送到控制端。

作品简介: 目前我国正面临用工荒的问题,如果引进餐饮服务机器人不仅可以减少运营成本,缓解人员紧缺的局面,还能实现老板的轻松管理。 本作品适用于大中型餐厅、酒店。她能代替服务员完成多媒体交互式迎送客人;人机交互式点菜,以多媒体形式介绍客人欲点菜特点;代替服务员自动移动到目标餐桌上菜;接收客人呼叫信号;辅助服务员作为餐后碗碟自动运载工具等大量的服务工作。

作品简介: 该作品以灾后救援为主题,设计了一款自适应路面应急救援辅助机器人,可在灾后第一时间辅助救援人员快速准确的完成救援工作。该机器人采用模块化设计理念,具有结构新颖、越障避障能力强、可适应各种复杂路面的特点;雷达及全球定位系统(GPS)的应用确保了信号检测和定位的准确性。该机器人实用性强,具有较高的推广价值,可向军事等领域推广应用。
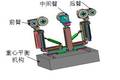
作品简介: 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。

作品简介: 随着科技的快速发展,机器人已经从科学家的实验室走进学校的课堂,机器人教育越来越受到人们的关注,也越来越受到教育界的关注。开展机器人教育,能够促进学生的全面发展。我国许多高校、职业技术学院、中小学都在逐步开展各种形式的机器人教育,有非常大的发展空间。 在此基础上,机器人的推广和普及是大有可为的,在这样的背景下就需要有适合的机器人教学平台。我们做的就是这一块的工作

作品简介: 本研究旨在利用通过对大鼠PAG脑区施加的电刺激引发的“虚拟恐惧”来实现大鼠长时间可控静止状态的实现。本研究结果可被应用入大鼠导航动物机器人中,以完成大鼠机器人在某些任务(如抢险救灾)中的定点观察及隐蔽等行为。

作品简介: 该项目是基于物联网技术与嵌入式技术实现远程无线可移动的视频监控系统,可以在客户机上利用浏览器并通过无线网络网络访问开发板,以实现实时视频监控。客户端在实时监控的同时可通过网页上的控制按钮对搭载摄像头以及机械臂的小车进行控制,使其可以实现自由移动,可使用户观察更多的区域。

作品简介: 通过光敏元件传感器和控制算法实现光运动机器人的设计。

作品简介: 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。

作品简介: 作品将人工手洗的揉搓等优势通过特殊的洗衣机结构、配合新颖的揉搓机构应用到洗衣机中,从而实现真正的仿人揉搓。

作品简介: 本设计将单片机通信、无线数据传输、各种传感器、图像采集、微控制技术综合到一起,有很强的实用性,并且其中将先进的无线通信技术,图像采集技术发挥到很大的功效。本作品用于测量实际生活中不利于人活动地方的环境动态监测并通过无线通信对此地区做相应的控制,以达到人们预期的目的。

作品简介: 本作品是一种五自由度电动机器人,它由控制部分和机械部分组成,包括了摩擦轮传动、皮带轮传动、齿轮传动等多种传动方式,控制部分是以8051单片机为核心的控制系统,本机器人结构简洁、操作方便、可以实现多种运动形式,可以广泛用于实验教学,可以做单片机实验,机械传动实验等。本电动教学机器人性能稳定,易于推广,在完成大部分机电控制课程的实验的情况下大大节省学校的开支。

作品简介: 本文提出了一种基于激光测距仪的移动机器人定位及环境地图构建的方法。通过图形块匹配、最小二乘拟合、聚类、线段优化等技术,对激光测距仪采集的数据进行处理,对机器人进行定位并形成一幅现场二维环境地图。 开发了仿真系统对算法进行验证,搭建模拟场地对算法进行实物验证,算法达到预期效果。 该算法对促进机器人的智能化与实际应用有很大意义。
作品简介: 针对我国目前现代化高楼玻璃幕墙清洗业的现状,设计了一种基于单片机的结构新颖、安全可靠、重量轻、效率高的高空智能擦玻璃系统,实现了通过地面手持人机交互设备无线控制高空擦玻璃器擦洗玻璃的一些功能,该系统解决了人工高空清洗玻璃存在的投入大、危险性高、难度高等问题。

作品简介: 它具有一般无人机隐蔽性好、生命力强、造价低廉、不惧伤亡、起降简单、操作灵活的优点
作品简介: 本课题以智能移动机器人为基础研究多智能体机器人编队问题,为复杂编队算法提供硬件实验平台。以四轴飞行器和博创科技出品的“创意之星”模块化机器人套件作为基础平台进行再开发,设计并构建了一组由四轴飞行器及多个移动轮式机器人组成的多智能体平台。四轴飞行器和轮式机器人相互配合实现编队功能,其中,四轴飞行器提供全局信息,轮式机器人提供局部信息,以及编队算法的验证,实现三维编队。

作品简介: 所谓新型履带即为形状可变履带,是指该机器人所用履带的构形可以根据地形条件和作业要求进行适当变化。 本作品的主体部分是两条形状可变的履带,分别由两个主电动机驱动履带的形状改变。再有四个电机驱动整个履带的前进或后退及转向;当主臂杆绕履带架上的轴旋转时,带动行星轮转动,从而实现履带的不同构形,以适应不同的运动和作业环境。

作品简介: 本作品通过把机器人系统模型简化为若干个标准模块化构件的不同组合装配,得到各种构形的机器人,并在其上搭建模块化机器人分布式控制系统,根据具体的工作任务和工作环境,组合装配出相应的机器人构形完成具体的工作任务。

作品简介: 本机器人集全球定位系统、ARM控制平台、人体红外感应、超声波测距、摄像头等功能模块于一身。机器人可以利用全球定位系统通过谷歌地图,结合超声波蔽障功能顺利到达指定坐标点,同时可进行数据采集、侦测伤者、摄像头照相等搜救工作。并根据需要将各种环境信息及图像信息及机器人各部分工作状态(如车速,超声波工作状态,电源电压等)传回ARM或PC控制平台,以确保高效、高质量的完成救援任务。

作品简介: 此方案设计的侦查排爆机器人能够实现两路视频图像的无线传输,经采集卡用上位机在电脑上显示实时图像,通过两路视频可以准确定位.控制部分是基于windows 操作系统用电脑键盘远程控制小车的运动以及机械手的操作,并可发送特定的指令,应变能力比较强。另外,我们机器人采用的是闭环控制,可以在上位机显示三轴加速度传感器反馈来的机械臂的运动信息;压力传感器反馈来的机械臂夹紧信息.
