














基本信息
- 项目名称:
- 基于气缸传动的四自由度教学机器人的研制
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
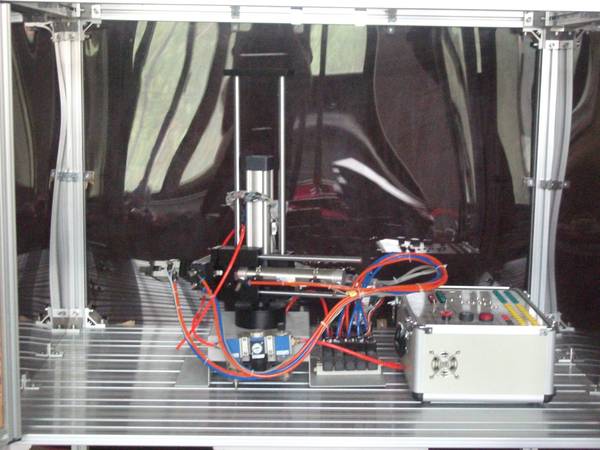
- 该机器人由机械部分和控制部分组成。机器人执行部件由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,能够实现四个自由度的运动,控制部分由控制箱和电磁阀等构成,控制箱采用MCS-51单片机作为控制核心,也可用PLC连接控制箱控制本机器人,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通信。
- 详细介绍:
- 本作品是一种四自由度气动机器人,该机器人由机械部分和控制部分和上位机软件组成。机械部分执行部件均由气动元件构成,由机身旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,构成了五个自由度。 控制箱内部采用MCS-51单片机作为控制核心,通过接线口及导线与控制气缸的电磁阀和气缸上的传感器相连。PLC也可直接与控制箱连接通过控制箱转接可控制本机器人。电磁阀采用三位五通阀,与气缸上的传感器配合可使机器人实现各种各样的动作。并可采用标准USB2.0协议和RS232协议分别与上位机软件进行数据交换,实现实时监控。 上位机软件基于OpenGL三维虚拟现实仿真技术的VB程序开发,可采用USB2.0协议和RS232协议进行数据传输,控制实物机器人运动,也可在电脑上进行同步仿真。 该仿真软件还具备编程功能,用户可自行编写控制程序,对程序进行仿真测试和联机调试。 机器人采用上位机虚拟机器人与下位机交互的控制方式,可在前期实验中通过上位机的仿真软件进行现场仿真,仿真成功之后,再将程序下载到下位机进行操作,降低了因操作不当引起仪器损坏的风险,大大提高了仪器的使用寿命。 该机器人由机械部分各气缸都是由接口板上电磁阀控制的,电磁阀的动作又是由控制箱电路系统控制实现的,每个气缸上都装配了磁感应传感器,用以准确控制气缸的行程,该机器人使用的是三位五通阀电磁阀,可使气缸在任何位置停止,控制器上配有急停按钮,用于紧急情况下的急停操作,上位机软件通过与控制箱通信,间接控制机器人运行,同时可在控制箱上外接PLC实现外部控制。 该机器人综合运用机械设计、气动、电子电路设计、软件设计等各学科知识,可应用于气动控制、PLC、单片机、DSP、ARM、高级计算机语言、虚拟仪器(Labview)、传感器技术、计算机控制等多门课程的教学中,真正实现了一机多用。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的: 本作品主要是设计研发一套集各种气缸、气动手爪等于一体的教学设备,以应用于《液压气动原理》、《工业机器人》、《物流设备与控制》、《单片机原理与应用》、《PLC与电器控制》的课程的教学实验中。 基本思路: 应用多种气动元器件,以最大程度地实现在气动原理方面的认知与控制应用,机械结构力求简单、精度适中,方便教学应用。 创新点: 巧妙地将多种气缸、气动手爪等结合在一起,构成了一套具有4个自由度的机器人,在控制系统设计上可采用单片机、ARM、DSP等的微处理器,也可应用PLC控制,也可以应用计算机高级语言进行控制,可应用虚拟现实和控制箜两种示教方式,将诸多的知识点融合在该机器人 的控制中,以实现教学实验应用上的一机多用。 关键技术: 巧妙地将多种气缸结合在一起,由旋转气缸、水平气缸、垂直气缸、手爪旋转气缸、手爪夹持气缸组成,实现四个自由度的运动;控制部分由控制箱和电磁阀等构成,电磁阀采用三位五通阀,可使机器人机械臂在任何位置停止,上位机软件基于虚拟现实仿真技术开发,与下位机采用USB2.0协议和RS232协议进行数据通讯。 技术指标: 底座旋转角度:180° 垂直移动距离:200mm 水平移动距离:200mm 手腕旋转角度:180° 手指开合距离:22 mm 最大载荷:0.715kg 最小周期:10s 空循环时间:10s 电源消耗量:0.5KW
科学性、先进性
- 作品的科学性: 该机器人结合机械设计、气动原理、电子电路设计、软件设计等学科知识,可应用于气压传动、PLC控制、单片机原理、DSP、ARM、高级计算机语言、虚拟仪器(Labview等)、传感器技术、计算机控制等多门课程的教学中,实现了一机多用。 作品的先进性: 将机电教学中的主要知识点包括:虚拟现实仿真技术、单片机与计算机的USB、网络通信技术、PLC与计算机的总线通讯技术、单片机、计算机的控制原理、气动传动等技术与知识点结合于一体,满足多个专业与课程的实验教学需要。 作品进步性: 机械部分采用直线气缸和旋转气缸传动及电磁阀控制,应用虚拟现实技术实现机器人在PC机上的三维虚拟仿真,控制箱配有急停按钮及外接控制端子,完全符合工业控制箱标准,在教学仪器方面具有绝对优势。 作品应用拓展: 本机器人经过加改造可用于工业生产,同时通过机器人之间通信可实现多个机器人联动作业,可实现生产线作业。
获奖情况及鉴定结果
- 一、2010年8月,在淄博举办的山东省大学生机电产品创新设计竞赛中,四自由度气动教学机器人获得二等奖。该项赛事由全国大学生机械创新设计大赛山东赛区组委会、山东省机械工业协会、山东机械工程学会、山东高校机械工程教学协作组、山东省大学生机电产品创新设计竞赛组委会联合举办。 二、到目前为止,四自由度气动教学机器人已向突尼斯出口40台,后续出口工作正在进行中。
作品所处阶段
- 生产阶段
技术转让方式
- 不转让,等条件成熟时我方自己开公司生产。
作品可展示的形式
- 实物、产品、现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品设计的四自由度教学机器人,全部应用气动元器件实现全部运动,通过控制箱按键控制或上位机控制可以实现多种运动形式,将多个知识点贯穿其中,是一款综合的教学设备。 该机器人适用于机械工程、电气工程、软件设计等专业本专科生的实验教学,具体可分为气动控制、PLC、单片机、DSP、ARM、高级计算机语言、虚拟仪器(Labview)、传感器技术、计算机控制等多门课程的综合性实验中。 针对目前国内外教学机器人的发展现状,本机器人具有综合性的特点,在2010年通过法国商人,国内采购中标出口40台。 该作品可应用于工科高等院校和职业院校中。目前在市场上,纯气动教学机器人尚属空白,因此该作品具有广阔的市场空间。本作品成本为5600元,在对外出口中,售价24000元,在2010年10月份,通过法国商人已出口到突尼斯前40台已获利70余万元。因此可见,若产业化成功,该作品的潜在经济效益是十分巨大的。
同类课题研究水平概述
- 气动机器人的应用现状 气动技术是以空气压缩机为动力源, 以压缩空气为工作介质, 进行能量传递或信号传递的工程技术,是实现各种生产控制、自动控制的重要手段之一。气压传动系统使用安全、可靠, 可以在高温、震动、易燃、易爆、多尘埃、强磁、辐射等恶劣环境下工作。而气动机器人作为机器人的一种, 它具有结构简单、重量轻、动作迅速、平稳、可靠、节能和不污染环境、容易实现无级调速、易实现过载保护、易实现复杂的动作等优点而被广泛应用。 气动机器人强调模块化的形式, 现代传输技术的气动机器人在控制方面采用了先进的阀岛技术(可重复编程等) , 气动伺服系统(可实现任意位置上的精确定位) , 在执行机构上全部采用模块化的拼装结构。所以, 气动机器人被广泛应用于汽车制造业、半导体及家电行业、化肥和化工, 食品和药品的包装、精密仪器和军事上。现代汽车制造工厂的生产线, 尤其是主要工艺的焊接生产线, 大多采用了气动机器人。 气动机器人学科要求 气动技术及气动机器人发展前景良好,在未来工业生产中将会得到更广泛的应用。作为工科院校学生,掌握气动技术将是行业的需要,但当前教学设备仪器中针对此方面技术的教学设备较少,而且价格昂贵。针对这一现状,该作品组成员在知道老师的带领和指导下,研制了四自由度气动教学机器人,该机器人不仅适用于气压传动相关课程的教学实验,而且可配合机械设计、电子电路设计、PLC、软件开发等学科开展实验教学。并且该机器人结构简单,便于拆装,可有效提高学生的动手能力,是工科院校理想的教学设备。此外,该机器人已投放市场,并出口欧洲,并在实际应用中受到多方好评。








