














搜索

作品简介: 本作品是基于正交频分复用(OFDM)技术的高速率短波调制解调器,能在恶劣的短波信道条件下实现低误码率和高速率传输,人机接口和设备接口符合使用要求。作品已通过了实验室物理测试和室外无线电通信测试。 本作品采用先进的OFDM技术,避开了单载波系统存在的复杂均衡问题,而且可扩展带宽到12KHz,大幅提高了传输速率以及高速传输时的传输效果,使得对于图像等多媒体信息也能够进行高质量的传输。本作品拥...

作品简介: “超影”微型涡轮喷气发动机结合机械、材料科学、运动控制、流体力学等多学科理论,进行技术创新与综合设计,完成了微型离心压气机,微型蒸发管式环形燃烧室,微型轴流涡轮,保形通道式扩压器以及微型控制器等的设计,用仅仅20个零部件就实现了发动机8一级的推重比。 “超影”可以直接装备到高级喷气航模、应急和科学实验平台以及高速靶机、微小型导弹等微小型无人武器系统,同时,以本作品为基础可以发展出用...
作品简介: 本作品将基于平面标定板的标定方法和自标定相结合,提出了一种简便易行的三步优化标定方法。并且用随机模式投射器,瞬时投射一幅随机图像到被测物体表面,一次测量只需要在瞬时摄取一个图像对,就可以生成物体表面的三维点云数据。基于姿态传感器实现了多视角测量数据的自动拼合。同时在双目立体测量的基础上,将随机模式投射器分别和两个摄像机组成单目测量模块,进行物体表面点云测量。
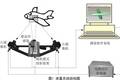
作品简介: 小型倾转旋翼飞行器是一种可以垂直起降、空中悬停、低速前飞,通过旋翼倾转可以像飞机一样高速巡航飞行的独特构型飞行器。该作品由旋翼、机翼、机身、水平尾翼、垂直尾翼、旋翼短舱系统、动力装置、倾转机构、起落架和飞行控制系统等组成。我们完成飞行器的总体设计、结构布局;设计、加工相关设备;开发机载控制系统、航姿测量系统以及地面监控系统,并展开了一系列地面、空中飞行试验,取得小型倾转旋翼飞行器全模式飞行。

作品简介: 本作品针对现有模拟器存在的不足和问题,设计研发了一个以多感官虚拟现实技术为核心的,用于对各种与飞行模拟器相关的新技术进行开发、实验、改进的多学科研究平台,即“飞行模拟技术开发验证平台”。 平台研制中,创新地采用了拓展性极强的半虚拟现实座舱技术、新型虚拟现实手部定位技术、头盔式视景设备及防眩晕技术、交流伺服控制力反馈操纵杆、轻巧灵活的平台布局及其机电控制总体方案,实现了对视觉、触觉、...

作品简介: 本作品是在一种低能见度条件下的辅助驾驶系统,用于帮助直升机、船只、车辆等交通工具进行安全驾驶。系统由探测器前端和融合电路两部分组成。探测器前端在保证光轴平行度,满足图像配准率95%以上的前提下采集红外和微光图像;融合电路实现降噪、融合、视频输出。输出图像采用了双光谱彩色融合成像,兼具微光图像分辨率高,层次感好和红外图像穿透烟雾能力强、作用距离远的特点。本系统在微光图像降噪、图像配准、彩色融合等方面...

作品简介: 本文在基于超级电容的并联混合动力整车性能仿真模型方面,根据大量的试验数据和理论公式,利用Matlab/Simulink建立了各个零部件的数学建模,研究了不同的混合动力道路循环工况下原型整车和混合动力整车的燃油经济性和动力性,同时分析混合动力各个零部件参数对混合动力整车性能的影响。 为了解决发动机电控单元(ECU)和混合动力整车电控单元(HCU)的控制策略及匹配试验这一制约混合动力...

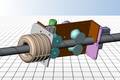
作品简介: 基于超磁致伸缩材料的应用研究目前已成为国内外机电工程领域研究的热点。在超精密加工领域,因其具有应变大、能量密度高以及驱动电压低的特点,可以替代目前主要采用的电致伸缩微位移驱动器,具有良好的应用前景。 本作品的基本思路是利用超磁致伸缩材料的磁机耦合工作原理,开发和制作基于超磁致伸缩材料的微驱动系统,主要解决微驱动系统的结构设计和控制方法等关键技术。作品使用国产Terfenol-D材...

作品简介: 针对当前农业生产存在的一些问题,本项目根据植物微生态原理从植物根际筛选出具有相容性和功能互补性的两株放线菌和两株植物内生细菌,并采用独特的生产工艺,研制开发出具有抗病、促生双重功能的植物微生态复合接菌剂。
作品简介: 发展高效设施农业过程中施行自动节水灌溉和智能控制是促进和保持农业可持续发展的重要途径。本设计在充分利用天然水源雨水进行灌溉的基础上,根据作物对土壤湿度的需求和计算机自动控制理论提出了温室大棚自动灌溉智能控制系统,旨在提高农业用水利用率,发展农村经济,促进社会主义新农村建设。

作品简介: 烯丙基缩水甘油醚是一种含不饱和碳碳双键和环氧基的活泼单体,是重要的聚合单体和有机合成中间体,广泛应用于精细化工领域,在环氧树脂、化学纤维、塑料和橡胶生产中还广泛用作添加剂、溶剂、催化剂、交联剂及链转移剂。在有机化工中,利用其良好的反应性和活泼性,通过加成、水解反应形成用于油漆和涂料工业的各种试剂;还有合成各种表面活性剂的重要中间体,通过烯丙基缩水甘油醚接枝在氢硅键上可制得广泛应用的有机硅表面活性剂...
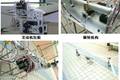
作品简介: 多功能线缆机器人是一种能在线缆(钢索)上自动行走的智能机器人,实现了线缆检修与除冰功能;它可以对斜拉桥、悬索桥钢索、电梯、土木施工升降机、矿井升降机、吊车等设备钢索线缆进行损伤检测,也可以针对严寒地带输电线缆、斜拉桥、悬索桥钢索等进行除冰,有效地为生产生活服务。在机器人爬升结构设计方面,本项目开发了一种锥面自锁夹紧机构,并对夹爪夹紧力、弹簧预紧力等进行了严密的力学分析;该机构能满足机器人爬升...

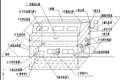
作品简介: 本作品为一种应用于污水生物处理工艺中的新型泥水分离装置:使用含孔道的普通基材(如无纺布)作为载体,利用微生物的附着性能,使微生物附着在基材表面形成一层动态的生物过滤层。泥水混合物通过基材时由于微生物滤饼层微细孔道的截留作用,将活性污泥截留在反应池内,处理后的污水透过孔隙排出,从而实现泥水快速有效的分离。

作品简介: 本作品结合国内外无人艇以及多体船的相关研究,设计了这种全新概念的水面多体多用无人艇。多体无人水面艇采用模块化结构, 通过更换任务模块可执行不同使命,而且多体无人艇具有较高的负载能力、良好的平台稳定性和更好的航行性能,因而本作品提供了一个多体无人艇的模块化公共平台,便于艇上多功能设备系统的灵活布置和功能实现,拓展了其军民多用途方向的发展。

作品简介: 康复机器人是机器人技术在医疗方面的新应用。在我国,康复医学工程虽然得到了普遍的重视,但是康复机器人研究仍处于起步阶段,所以康复训练机器人有广阔的市场前景。基于虚拟现实的上肢康复训练机器人系统不仅可以利用机器人对病人进行康复训练、数据记录、分析和掌握病人的康复情况,而且采用基于虚拟现实的辅助训练软件,通过虚拟环境来鼓励患者积极主动地参与康复训练,从而提高康复训练的效果。
