














基本信息
- 项目名称:
- 自拼接双目立体测量系统
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品将基于平面标定板的标定方法和自标定相结合,提出了一种简便易行的三步优化标定方法。并且用随机模式投射器,瞬时投射一幅随机图像到被测物体表面,一次测量只需要在瞬时摄取一个图像对,就可以生成物体表面的三维点云数据。基于姿态传感器实现了多视角测量数据的自动拼合。同时在双目立体测量的基础上,将随机模式投射器分别和两个摄像机组成单目测量模块,进行物体表面点云测量。
- 详细介绍:
- 物体的三维外形轮廓测量技术是实施逆向工程、产品质量检测、虚拟现实等的前端基础,在飞机、汽车、船舶、模具、娱乐、生物医学等行业有广泛的应用需求。本作品结合图像处理技术、摄像机标定技术、匹配重建技术、测量数据拼合技术和系统软硬件实现技术,自主开发了一种基于随机模式投影的双目立体测量系统RIMS (Random Illumination Measurement System)。RIMS直接模拟人类双眼来获取景物的三维信息,即利用两个有一定间距、成一定角度的摄像机同时摄取场景的图像,通过计算空间点在两幅立体图像中的相差得到其三维坐标值。 作品基于瞬时随机模式投影的三维轮廓测量的软硬件设计,使得RIMS仅通过投射一幅随机模板图像到被测物体表面,结合双目立体测量结构来获取三维点云数据,单次测量如同普通照相一样控制在极短时间内完成,能胜任被测物体在振动、噪声等非静态环境下的测量,同时整个投影装置乃至整个立体传感器紧凑小巧。 作品将基于平面标定板的标定方法和自标定方法相结合,实现了一种简便易行的三步优化标定方法。该方法在两步法的基础上,进一步将标定板上靶点的空间坐标作为优化变量进行优化求解,并用实际距离已知的两个点之间的间距精确恢复由此带来的尺度变化,从而大大降低了标定板的制作和计量校准要求,同时提高了标定精度。并且在实际标定过程中只需双摄像机从不同角度对平面标定板拍摄一组图像,即可自动完成系统内外参数和投影器以及姿态传感器的标定。算法稳定可靠,能够满足一般工业测量的精度要求。 作品基于姿态传感器实现多视角测量数据的自动拼合。将结构小巧的姿态传感器稳固于测量设备上,使得测量设备在改变位置和姿态对被测物体进行多视角测量时,能够自行确定立体传感器坐标系的坐标变换,从而无需在被测物体表面和测量场景中布置标记点,也无需采用专门的数控机械装置,就可以稳定可靠地实现多视角测量数据的自动拼合。 作品在双目立体测量的基础上,将随机模式投射器分别和两个摄像机组成单目测量模块,进行物体表面点云测量。在该方法中,空间一点及其邻域只需要在左右任意一幅图像上成像良好,就可以由其中的一个测量单元得到其三维坐标,因此避免了由于某个单摄像机视线方向存在高光及遮挡等原因引起的三维测量数据缺失,有效弥补了单纯双目测量的不足。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 三维外形轮廓数据的测量在航空航天、汽车制造、生物医学、文物考古等行业需求广泛。本作品研究开发的瞬时随机投影的双目立体测量系统旨在方便快捷地获取物体表面三维点云,并且实现多视测量数据自动拼合,同时减小被测物体表面高光反射以及自身遮挡造成的影响。系统由两个CCD相机、投影器、姿态传感器、控制器等组成。测量软件控制投影器向物体表面投射瞬时随机光场,两个相机同步曝光,对采集到的图像对进行处理和匹配运算,就可在没有任何扫描或变换结构光投影模式下方便快捷地获取物体表面数据。利用姿态传感器,确定多视角测量过程中测量装置的旋转变换矩阵,然后通过软件算法确定平移向量,从而无需任何其它辅助手段,就可以稳定可靠地实现多视角测量数据的自动拼合,形成物体完整的轮廓数据。另外,两个相机分别与投影器组成单目测量模块,从而只要空间一点及其邻域在左右任意一幅图像上成像良好,就可以由其中的一个单目测量单元得到其三维坐标,避免单纯双目测量模式下某个相机视线方向存在高光及遮挡引起的三维测量数据缺失问题。为实现以上目的,必须解决以下问题:对两个相机内外参数、设备坐标系与姿态传感器坐标系之间关系、投影器发出光线束空间方程进行标定,单/双目测量时随机模式投影下的图像匹配及三维点云生成技术,多视数据整体拼接优化技术,两个相机及投影器的时序控制,测量软件的综合开发。本作品单次测量点云数量为10-20万个,单次测量的不确定度小于0.03mm,多视角测量数据拼合误差不大于0.1mm/m,相机分辨率为1392×1040。
科学性、先进性
- 1、只要投射瞬时随机光场到被测物体表面,两个相机同步曝光,瞬时就可获得三维重建所需图像信号,单次测量如同普通照相一样方便,而且能胜任动态物体以及在振动、噪声等非静态环境下的测量,同时整个测量系统结构简单,成本较低。2、利用姿态传感器,使系统在改变位置和姿态对物体进行测量时,能够自行确定测量装置的旋转变换矩阵,并利用统计聚类方法计算相应的平移向量,从而无需在物体表面和测量场景中布置标记点或采用专门的机械装置,就可实现多视数据自拼接。目前未见用类似方法进行多视数据拼合的报道和商用系统。该方法已申请了国家发明专利。3、要实现双目测量,又要实现单目测量,同时要利用姿态传感器辅助进行多视数据自拼接,这就要求在对两个相机内外参数进行标定之外,还要对投影器和姿态传感器进行标定。对此本作品提出了系统综合标定方法。4、在双目测量基础上实现单目测量。这使得只要空间一点及其邻域在左右任意一幅图像上成像良好,即可由其中的一个测量单元得到其三维坐标,避免了该点在某个相机视线方向存在高光反射或遮挡而导致的数据缺失。
获奖情况及鉴定结果
- 2008年12月本校第十一届大学生科技节特等奖。
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 实物 现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
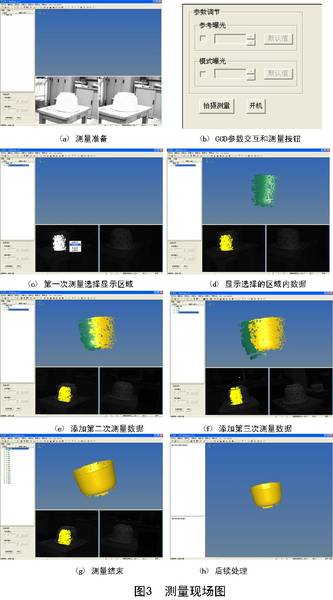
- 1、使用说明。测量软件分为以下工作模式。(1)系统标定:分别对标定板正反面拍摄一组图像,完成相机、投影器、姿态传感器的标定;(2)双(单)目测量:瞬时曝光拍得一对图像,用双(单)目测量算法生成测量区域的三维点云,并将本次测量数据变换到全局坐标系下。(3)数据处理:主要完成整体拼合优化、数据融合、数据精简、三角网格模型生成等。2、技术特点和优势。(1)无需扫描和结构化光照模式转换,两个相机瞬时同步拍摄一对图像即可完成测量,并胜任非静态物体及环境的测量;(2)仅靠测量系统自身就能实现多视数据自拼接;(3)投影装置结构简单,成本低;(4)系统标定简单易行;(5)减小了物体表面高光反射和遮挡产生的影响。3、适用范围。本作品可广泛应用于工业产品、动态物体、人体等的三维外形测量。 4、推广前景。具有明显的性价比优势,且具有“一键式”瞬时拍照测量、测量数据自拼接等独特优点。本作品后续的各项功能还将陆续开发、升级,进行功能模块的客户化定制式开发及各种专用测量系统。
同类课题研究水平概述
- 基于光学原理的各种三维坐标测量技术发展十分迅速,一些相对成熟的技术已形成了三维坐标测量系统。其中具有代表性的有:激光线扫描三维测量机(如3D Scanner®)、结构光编码的光学扫描仪(如ATOS®、Comet®)、手持式激光测量仪(如T-Scan®)等。这些坐标测量设备均是基于光学三角形原理并辅以一定的结构光照射。前两种测量设备在某些情况下不可避免地存在视线遮挡问题,产生数据缺失。另外结构光编码需要多次变换投影模式,结构相对复杂、成本高。手持式激光测量仪要求使用者手持激光扫描器像刷油漆一样连续“刷”过物体表面,系统采用一个光学跟踪器来确定激光扫描器的六度空间位置,以便由此增加测量的灵活性。但由于激光束的连续移动是通过手持扫描器进行,对大型工件的整体扫描也是十分费时费力的。另外,由于测量者手臂的抖动,测量得到的数据排列往往不利于后续处理。 不同于上述基于光学传感器和光学三角形原理的另一类测量方法,是基于机械接触式传感的测量方法。该方法测量精度高,在工业界应用也很广泛,但对环境要求比较高,需要专门的测量室和专用测量台,且测量范围有限,测量效率低,不适合复杂自由曲面物体的测量。 我国在三维测量技术方面也进行了大量的研究。其中,航空精密仪器研究所在三维接触式测量方面取得了令人瞩目的成绩,研制了系列三坐标测量机。哈尔滨工业大学将大型三坐标测量机和基于CCD摄像的二目成像原理相结合,进行大型工件特征点的检测。在他们的方法中,工件需要放在特制的精密转台上以提供标准的位移,因此硬件设备组成较为复杂,缺乏足够的柔性。对于基于CCD照相的表面点云测量方法,上海交通大学、西安交通大学、清华大学、东南大学等单位也都进行了研究,开发了原型系统。这些系统基本上都是采用多次投射不同的条纹模式结构光并拍摄多对图像用于解算三维点坐标,而且多次测量数据的拼合没有得到很好解决。 本作品基于瞬时随机模式投影的双目立体测量系统,具有“一键式”瞬时拍照测量、无需任何辅助手段即可完成多视角测量数据的自拼合等目前其它方法所不具有的突出优点。








