东北大学专区
基本信息
- 作品名称:
- 基于无线传感器网络和视觉的灾难搜救机器人
- 大类:
- 科技发明制作B类
- 小类:
- 信息技术
- 简介:
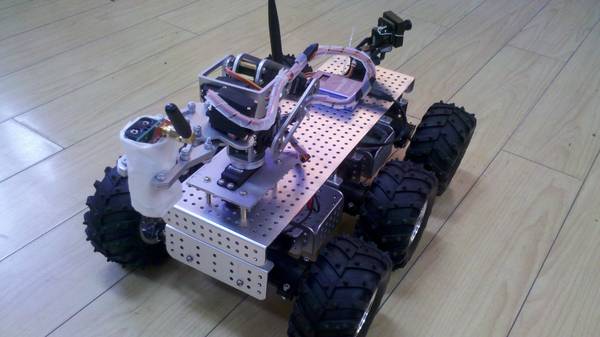
本作品针对突发灾难救援,开发了移动机器人系统,用于建立环境监测网络和搜救幸存者。作品采用六轮平台,通过无线进行遥控,可灵活攀爬楼梯;利用六自由度机械臂可在现场部署和组建ZigBee监测网络;设计了新型RF生命标签以标记幸存者,帮助救援人员确定幸存者具体位置;采用了新颖的头部姿态随动视觉系统,使操控者如身临现场,优化了操作体验,从而有效提高救援效率。
- 详细介绍:
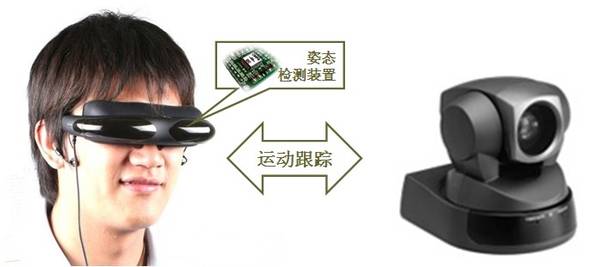
为了能够帮助救援人员更加高效、安全地执行救援任务,设计了该款能够在灾害现场帮助救援人员执行搜救和侦察任务的遥控机器人系统。该机器人系统的核心功能包括三个方面:(1)移动机器人平台可携带无线传感器网络(WSN)节点,在灾难现场进行传感器网络的部署,并组建ZigBee无线传感器网络系统,及时发现潜在危险并指导救援人员搜寻幸存者;(2)机器人通过携带的基于ZigBee的“RF生命标签”装置,标记所发现的幸存者,并可根据RSSI机制帮助救援人员寻找幸存者;(3)机器人集成了基于视频眼镜的头部随动视觉系统,能够给机器人的遥控者带来更好的操控体验,提高工作效率,更有效地帮助救援人员完成搜索和侦察任务。
移动机器人平台采用了具有较强越野能力的六轮运动平台,能够完成爬楼梯、越障等高机动性动作,非常适合执行灾难现场的搜索与侦查任务。该机器人系统具有较强的的搜索和侦查能力,为了有效地对现场进行信息采集,由机器人携带各种无线传感器网络节点,通过其机械臂在现场部署WSN节点,结合机器人本身携带的移动节点,可构建实时监测的ZigBee传感器网络。操作人员可以根据机器人灾难从现场传来的信息,如是否具有可燃气体或有毒气体或是否具有被困幸存者等,有效地指导救援人员实施救援或躲避潜在危险。该系统除了具有信息收集能力外,还可通过捆绑微型对讲装置的RF生命标签可获得幸存者数量和相对距离信息,并提供语音通讯,辅助救援人员搜寻幸存者。由于搜救机器人需要进入人所不能观察到的灾难现场内部,其图像采集系统的性能对于机器人的搜索侦察能力具有重要影响。为了提高搜索侦察能力,设计了基于视频眼镜的头部随动视觉系统。该系统不但能够将影像和声音实时呈现给操作者,而且能够将操作者头部的运动传递给了机器人高清摄像机云台,使操作者与机器人同步观察,给操作者以完全的第一人称操作感。由于该搜救机器人平台高度相对较低,其摄像机高度低于30cm,能够充分利用火灾现场地面附近的能见度相对较高的空间执行搜索和侦察任务。- 获奖情况:
第十二届“挑战杯”作品 三等奖
无