哈工程专区
您现在的位置:专区首页 >> 优秀作品
优秀作品展示
-

本作品是一种具有自清洁功能的环保小屋,即无需人工除尘的房屋。采用自主研制的具有分等级结构的超疏水材料作为房屋屋顶的外表面,通过表面硅烷化处理实现超疏水功能。具有免人工清洁、防沾湿、低耗能等功能。本作品在室外天线、太阳能面板防水、防冻方面;石油管道防止石油在管道壁粘滞;轮船的外壳防止为生物吸附、减阻等...
-

项目是由ICPF材料驱动的超微型仿生机器鱼,可由3V低电压驱动,具有体积小、无噪音、无水分解、成本低、生物亲和力很强等特点。作品对毫、厘米级水下微型仿生机器人的设计方法和控制方式进行研究,进行了运动和动力学建模。使用ICPF低电压“生物型”驱动器作为仿生机器鱼的动力装置,通过内置控制电路和微传...
-
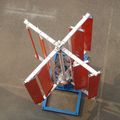
本作品设计了一种集海洋风能与波浪能开发于一体的浮海型混合发电系统。采用模块化设计思想,立轴风力发电装置与波浪发电装置设计成可独立运行的模块。立轴风力发电模块与波浪发电模块安装在浮体平台上,通过锚泊浮于工作海域。本作品走多能互补道路,实现了风能和波浪能的综合利用。
-
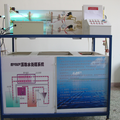
该设备利用了压载水处理方法中的高梯度磁过滤技术、紫外线处理技术和羟基溶液灭活技术,对压载水进行“三位一体”的处理。基本思路:采用复合压载水处理方法:海水---高梯度磁过滤器---文丘里管+紫外线催化杀菌装置---压载水。压载水首先进入高梯度磁过滤器,经文丘里管后进入高效紫外线催化杀菌装置,并最...
-

针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
-
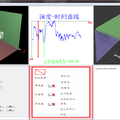
本作品旨在研制一种利用水声遥控方式控制的水下机器人验证机,该技术涉及到多学科领域。水声遥控系统采用性能优异的水声信道编码技术,使得水声遥控可靠性得到显著提高。通过所建立的动力分配数学模型,控制8个推进器电机的旋转方向和旋转速度。在人工操控条件下控制验证机的姿态和运动,使载体更加适应机器人水下作业。