燕山大学专区
基本信息
- 作品名称:
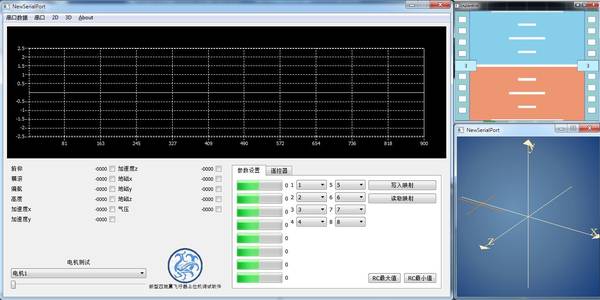
- 新型自适应四旋翼飞行器
- 大类:
- 科技发明制作A类
- 小类:
- 机械与控制
- 简介:
本作品采用嵌入式智能控制技术,提出并实践了一套自主检测、适时调整航向、具有自适应性导航飞行控制方案。在核心控制上,作品基于飞行器的非线性数学模型,应用卡尔曼滤波、方向余弦、四元数等多种算法对传感器数据进行处理得到精确的飞行姿态。同时先进的神经网络算法及绝对位置检测单元的应用提高了飞行质量,实现自主飞行和定位巡航功能。因此该飞行器能够应用于搜救、航拍和侦察等方面,成为一种军民两用的高技术产品。
- 详细介绍:
随着航天技术的不断发展和成熟,微小型无人机已经成为全世界航天领域研究的重要方向之一。本作品是一种微小型四旋翼无人机(又名微小型四旋翼飞行器)。 该飞行器采用嵌入式智能控制技术,建立了一套基于微处理器下的自主检测并适时调整航向的具有自适应性导航飞行控制方案并将其应用于微小型四旋翼飞行器。我们在研究微小型四旋翼飞行器的空气动力学的非线性数学模型的基础之上,应用卡尔曼滤波算法对传感器数据进行滤波处理和融合,应用方向余弦和四元数算法对滤波后的数据进行二次处理,从而得到飞行过程中精确的飞行状态变量。进一步运用神经网络整定的算法结合四旋翼飞行器的数学模型进行飞行控制。使飞行器的在多种环境中都能快速、平稳飞行,甚至能高质量的完成空中悬停、低速平飞等高难度飞行动作。此外,由气压传感器等模块组成的绝对位置检测单元能准确计算出飞行器在绝对空间中的位置,并有效地消除误差积累,使飞行器能够做到自主飞行和定位巡航。从而使四旋翼飞行器能够应用于海洋勘探、搜救、航拍、侦察和监视等方面,因而该四旋翼飞行器将成为一种军民两用的高技术产品。
- 获奖情况:
第十二届“挑战杯”作品 三等奖
“挑战杯”2011河北省大学生课外学术科技作品竞赛一等奖