














搜索

作品简介: 本项目根据市场需求设计一台筷子清洗消毒烘干排序整理机,本机集清洗模块,消毒模块,烘干模块,排序模块,整理模块等多功能模块一体化的自动化产品。经过浸泡的筷子能在本机中自动化实现清洗,消毒,烘干,排序,整理等多道工序。根据试验结果显示,本机的各功能模块基本上符合设计要求,其中在整理模块的筷子大小头排序成功率在99%以上。本机的工作效率为20分钟清洗600双筷子,平均每秒为1根筷子。物料(筷子)规...
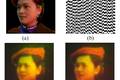
作品简介: 计算全息用于立体显示不仅引起了三维显示学术界研究热潮,而且也得到了光电子相关产业的广泛关注。 大面积计算全息图的快速输出,一直是学术界以及产业界面临的共同难题。针对传统计算全息图输出设备的应用局限性,我们结合计算机和光电技术,研制了一台计算全息图自动输出系统,为计算全息图的快速输出提供必要的设备。

作品简介: 该装置主要用于边防哨所、沙漠、戈壁滩等严重缺水地方的制水,不需要水源,以空气源为取水对象,将空气中的气态水转化为可供人们饮用的液态水,保证极端情况下部队和居民的饮水需求。

作品简介: 本发明作品研发了一种仍依靠光干涉原理,将一部分干涉光经分光棱镜分光转化成数字信号实现光数一体双模式智能瓦斯检测,该新型瓦斯检测仪可随时检测作业场所的瓦斯浓度,数字和光谱同时显示浓度值,保存历史数据供查询与上位机下载,可设定报警值实现声光报警,高度智能化,以适应煤矿安全生产的需要,为我国煤矿安全生产提供保障。

作品简介: 本检测仪采用 DSP处理器(TMS320F2812)为核心,通过分析超声波在混凝土预制板中传播的声速与声压衰减,从而对预制板的性能做出整体评价。它采用无损检测技术,将发射控制、采集滤波、AD转换、FFT运算、分析、显示控制、数据存储、数据通信等功能融为一体,并通过LCD液晶屏将分析结果显示出来,可同时利用上位机对多组数据进行分析。

作品简介: 本作品以清洗用水作为唯一的动力源,利用水射流所产生的负压特性实现机器人在清洗壁面上的吸附,利用水压驱动的活塞附以连杆机构实现机器人的直行、转弯等爬行动作,并利用水浸式超声波去污原理实现壁面的清洗。所研制的机器人因其质量小、可靠性高、供能方式简单等优点,非常适用于高楼外墙清洗,现场试验也证实了该机器人的实用性和可靠性。

作品简介: 我国城市地铁轨道交通现已进入快速发展阶段,在看到市场效益的同时还应看到地铁发展中还存在着较为突出的问题,如运行故障、信号灯失灵等现象时有发生,严重威胁地铁的安全运行。本设计着眼于地铁信号指示环节的改进,运用先进的电磁兼容技术、PWM技术、电流自适应匹配技术,设计一种大功率、拥有智能化故障检测功能的新型地铁交通指示系统,光信号有效传输距离不小于750米,能耗降低70%,整机功耗不大于24VA...

作品简介: 该作品属于垂直轴风力发电机,具有安装维护简单、噪声低、叶片受力稳定等垂直轴风力机的固有优点。特点在于风力机风轮由两个叶片组成,可依据风速风向仪、光电编码器测得的风向、风速、叶轮转速及转角等信号,通过单片机控制每个叶片驱动电机,自动调节各叶片的攻角以获得最大的驱动力矩和发电效率。该系统可以广泛地应用在风力资源较丰富的哨所、岛屿、偏远山区等风力资源较丰富的地区,免除远距离的电线电缆的建设费用,带来...
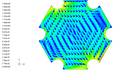
作品简介: 正六边形球面肋板式换热器板片是一种新型板式换热器板片,具有传热系数高、压降小等特点。项目研发以换热器单位压降传热系数和单位质量换热量为优化函数,从机械类工业产品设计理念和相关设计方法切入,对各个设计方案进行逐个数值模拟分析比对,优化得到一种性能优良的正六边形球面肋板式换热器。

作品简介: 在当前反恐、防暴已成为一种新的作战模式,具有很强的特殊性,需要对多种形式目标实施快速、准确火力突击。据武警部队对反恐、防暴案例的统计:移动目标射击达34.3%,隐显目标射击达37.1%,静态目标射击仅为2.2%。研发具有远程遥控、无规律变速曲线运动、快速隐显、自动报靶功能的靶标,是新形势下实弹射击训练的迫切需求。 “实弹射击远程遥控靶标机器人”创新点及技术先进性: 1、采用无线双向通信方式,实...

作品简介: 数控气动爬梯子消防机器人,采用气动作为动力,基于单片机控制,用气缸带动连杆机构,使两幅钩子交替有序抬起、伸出、落下,实现机器人自动沿梯子上下爬动的动作。应用仿生学原理,用机械方式模仿人手爬梯子的动作而设计的,其结构简单,动作可靠,实测表明该控制策略可行、响应快速。这种新型机器人在很多领域有着广泛的应用潜力。

作品简介: 本作品设计制作了仿生UUV模型。模型突破生物的生理局限,采用双尾鳍推进方式,不仅有效抑制了常规尾鳍推进所带来的本体晃动问题,改进了潜航器巡游的稳定性,而且显著提高了推进速度;此外,借鉴飞行动物拍翼的机动灵活之所长,为潜航器研制增设了强化功能的两自由度胸鳍机构,实现了高机动性。该模型的研制成功不仅验证了组合仿生概念的可行性,还初步揭示了其优势,为仿生UUV提供了一条新的发展思路。

作品简介: 本作品结合国内外无人艇以及多体船的相关研究,设计了这种全新概念的水面多体多用无人艇。多体无人水面艇采用模块化结构, 通过更换任务模块可执行不同使命,而且多体无人艇具有较高的负载能力、良好的平台稳定性和更好的航行性能,因而本作品提供了一个多体无人艇的模块化公共平台,便于艇上多功能设备系统的灵活布置和功能实现,拓展了其军民多用途方向的发展。

作品简介: 本装置采用R22/R23混合工质时,当以1:2配比的情况下对实验装置进行了一系列试验研究,成功地使冷柜温度稳定在-62.0℃,并且系统性能稳定。

作品简介: 棉花产业是新疆及兵团的支柱产业之一,由于特殊的“地膜栽培”模式,导致机采过程中混入大量地膜,不仅降低了棉花加工质量,增加了后续棉纺企业除杂的难度,同时给企业带来巨大的经济损失。目前地膜的分拣主要靠人工实现,劳动强度大、效率低、成本高,制约了棉花产业的发展。 该作品把静电技术与化工中常用的流化技术进行有机集成,基于籽棉与残膜荷电特性以及流化特性的差异,解决了基于计算机视觉技术难以检...

作品简介: 新型反冲式发酵料液混合搅拌装置摈弃了传统的搅拌装置的设计思想,充分结合了机械搅拌和液体搅拌的优点,利用泵作为动力源带动料液形成的流场效应,同时采用了料液孔口出流和反冲作用原理,使料液在搅拌过程中始终处于由罐体内-外-内的动态循环中,使料液混合更加均匀。
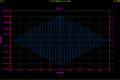
作品简介: 实现了函数发生器,示波器,频率计,谱分析仪和数据记录仪等功能的实用虚拟仪器。

作品简介: 项目研究的是新一代的五轴并联机床,该机床与传统机床相比具有造价低,加工速度快,精度高,可实现五面加工等显著特点,尤其适用于加工具有复杂曲面和超大型零件。项目的研究和设计具有先进性和创新性。项目设计了新型的五轴联动机床结构,使得机床只需五点定位即可,而且消除了冗余自由度,使得控制模型简化。另外还自主开发了五轴联动机床的数控模型,使得机床的插补点直接在所加工的工件曲线上,大大提高了加工精度。项目的研...

作品简介: 作品为一台履带式ROV水下作业机器人,为采矿,水体污染过滤清理,管道维护的专业领域设计制作,多功能,专业化。实现水下自由运行和水底爬行的功能。开发水下巡视功能,如海洋输油管道检查;跨江、跨河管道检查;船体检修;船底探查;码头及码头桩基、桥梁、大坝水下部分检查;航道障、港口作业;钻井平台水下结构检修;水下考古、水下沉船考察等一系列应用。开发清洗功能,如泳池,水池,水箱的不换水清洗,解决传统清洗水资...

作品简介: 振动时效是在激振器的周期性外力作用下,使工件获得足够大的振动能量,产生交变的动应力,动应力与工件残余应力相互叠加,驱使工件产生振动,使大量位错组织一部分钉扎在杂质上,另一部分聚集到晶粒间界上,还有一部分位错获得足够大的能量,穿过晶界而进入到另一个晶粒内,以此来消除工件内部的残余应力。振动时效具有时效周期短、能耗低、效率高等优点,被称为二十一世纪高效节能环保的新技术。本作品通过对振动时效控制系统的研...
