














搜索

作品简介: 工业中聚晶立方氮化硼(PcBN)是立方氮化硼单晶(cPBN)与一定量的粘结剂在高压高温条件下制得的,在PcBN中,粘结剂的粘结效果和性能是对其性能影响最大的因素之一,本课题的目的是希望通过研究非计量比的氮化钛(TiNx)在高温高压条件下与cBN烧结后的性能,试图使PcBN的性能有显著提高;

作品简介: 利用太阳能电池来解决机器人的能源自治问题;利用研制的二自由度太阳自动跟踪平台及其相应控制系统,实现对太阳的自动跟踪,保证机器人移动时太阳能电池板始终与光线垂直,实现太阳能最大程度的转化为电能;利用充、放电系统实现能源自治,即移动机器人闲时储能和忙时根据移动机器人的需要稳定供给能源。为实现移动机器人完全智能化的问题打下基础。

作品简介: 本地震灾害救援手套由远节指结构、中节指结构、近节指结构和皮质材料组成。 主要创新点: 在手套近节指关节处添加了连杆滑道机构,以此来实现机械手套的自动锁死功能,使手套手指能自动保持弯曲状态,在提高救援人员的工作效率的同时也达到了节省救援人员体力及保护救援人员双手的目的;当工作完成后或临时需要手指伸直时,救援人员只需要在此基础上稍加弯曲,即可实现手套由锁死功能到解锁的转变,手指自由伸直。

作品简介: 随着科技和工业的发展,三维测量技术在反求工程、工业自动检测、古文物保护、质量控制和医学美容等各个领域的应用日益重要。传统测量方法存在着测量速度慢、与物体表面接触、不易操作、应用范围狭窄等缺点。而基于光学全场的三维测量技术由于不和物体表面接触、测量和处理速度快等优点正成为三维检测领域的热点。本作品正是基于这一想法进行相关研究和探索,设计一套三维光学数字化测量系统。

作品简介: 太阳能作为绿色新能源,是未来能源发展的重点,但是太阳能最大的缺点就是能量密度比较低,为了克服这个缺点,设计了太阳能自动追光装置,本装置采用嵌入式技术,用GPS获取当地的经纬度和UTC时间,再由太阳高度计算公式计算出太阳高度角和太阳方位角两个物理量,核心模块驱动水平和垂直两路步进电机校正太阳能收集装置的位置,使之与太阳方向垂直。使用智能追光装置后,电池板的发电效率能提高30%以上。

作品简介: 微波技术在雷达、通信系统和遥感系统已得到了广泛的应用,近年来微波加热技术在医学、食品加工、石油、环境保护等领域也开始普及应用。微波技术应用在萃取领域,特别是中草药的萃取技术与装备只是刚刚起步,还停留在实验阶段。我们查阅了很多资料,设计了一种可工业化萃取的大容量分层辐射微波萃取装置,并研制了一款新型微波萃取样机。通过试验,取得了较好的数据。我们设计的这款装置,在国内外同类产品中未见报道。

作品简介: YSU_ZB监控系统是集国内外最先进的煤矿监控技术优势并针对我国煤矿现状而开发的一套软、硬件结合的全矿井安全生产综合无线监控系统。 随着传感器技术、无线通信技术、网络技术和嵌入式技术的不断发展,近几年来出现的无线传感器网络技术为解决煤矿安全问题提供了可能的解决方案。无线传感器网络监控系统有着成本低,体积小,安装、配置、维护简便,可重复利用,自动动态组网,持续工作时间比较长(1-2年)的特点,通过...

作品简介: 南京长江隧道作为目前国内长江流域施工技术难度最大的工程项目,具有直径超大、水下压力高、地质条件复杂、透水性强、覆土超薄、掘进距离长、工程地质及水文条件风险不可预测等七大世界级技术难题,对此巨大的工程,采用盾构机进行作业。 盾构机配置设备数量多,关联性强,任何一套单独设备出现故障都将不同程度地影响掘进进度,关键部位的损坏会导致整台机器处于停滞甚至瘫痪状态。 基于虚拟仪器的...
作品简介: 作品名称:高精度电磁阀动作时间测试装置 学科类别:科技发明制作A类 作者学历:本科
作品简介: TLMEL900.16-40-8型提梁机用于高速铁路客运专线预制梁场双线混凝土预制箱梁在制梁台座、存梁台座间进行挪移;从存梁台座提梁,吊运至运梁车行进路线上,为运梁车装载箱梁。长期以来,包括提梁机在内的高铁建设运、架、提设备及关键技术主要依靠进口,为突破国外的技术垄断,我们为秦皇岛通联重工有限公司(现已更名为秦皇岛天业通联重工股份有限公司)研制了TLMEL900.16-40-8型提梁机,实...

作品简介: 在当前反恐、防暴已成为一种新的作战模式,具有很强的特殊性,需要对多种形式目标实施快速、准确火力突击。据武警部队对反恐、防暴案例的统计:移动目标射击达34.3%,隐显目标射击达37.1%,静态目标射击仅为2.2%。研发具有远程遥控、无规律变速曲线运动、快速隐显、自动报靶功能的靶标,是新形势下实弹射击训练的迫切需求。 “实弹射击远程遥控靶标机器人”创新点及技术先进性: 1、采用无线双向通信方式,实...

作品简介: 机器人手腕力觉感知系统由腕力传感器、数据采集卡、PC微型计算机和信号采集、数据处理软件等组成。腕力传感器是该系统的核心单元,其结构采用双层预紧式设计方案,以球窝锥头式球面副替代传统球面副并实施整体预紧,集结构稳定、应力耦合低、刚度大等特性于一体。实验结果表明该系统具有较高的测量精度,可应用于机器人精密装配、轮廓跟踪、去毛刺等与环境接触的场合,可以满足现代工业生产对机器人技术提出的诸多要求。

作品简介: 本作品针对智能电网双向的电力潮流和数字信息流,研发了一种实时测量双向通信智能电表。 1、储存刷新模块为智能电网高效节能管理,实时提供带时标的电量信息;2、双向交互式通信模块,可接收调控信息及浮动电价,发送电量及异常故障信息;3、双向电量计量软件,通过软件判断功率因数,成功地集成用户侧的分布式新能源;4、通过发送检测到的故障信息,电力公司可快速定位诊断电网故障点。

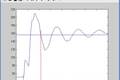
作品简介: 本作品采用嵌入式智能控制技术,提出并实践了一套自主检测、适时调整航向、具有自适应性导航飞行控制方案。在核心控制上,作品基于飞行器的非线性数学模型,应用卡尔曼滤波、方向余弦、四元数等多种算法对传感器数据进行处理得到精确的飞行姿态。同时先进的神经网络算法及绝对位置检测单元的应用提高了飞行质量,实现自主飞行和定位巡航功能。因此该飞行器能够应用于搜救、航拍和侦察等方面,成为一种军民两用的高技术产品。

作品简介: 本作品实现了常用滚动轴承和滑动轴承基本参数信息查询、性能特点与应用介绍、润滑方式选用、工况选型、配置方式选择、承载能力计算、预期寿命校核、设计报告生成与打印等功能。系统的主要特点:(1)建立了覆盖轴承手册全部信息的数据库;(2)实现了滑动轴承的设计计算;(3)具有良好的可扩展性。本系统现已移植到省制造业信息化ASP公共服务平台上,并应用在3家机械制造企业,取得了良好的效果。

作品简介: 本作品主要用来解决无人机的成本控制和远程控制问题。利用民用手机网络进行数据的传输,通过自行设计的机上控制设备,实现了在低空环境下,对无人机进行多点、不限距离的远程控制。利用航模队自行设计制作的无人驾驶飞机,实现长航时载重飞行。低廉的价格和使用成本、方便的远程控制、比较远的航程和灵活的载重配置,为小型无人机在各种民用行业的日常应用,提供了较为完善的解决方案。

作品简介: 本项目具有以下特点: 1、技术先进:采用红外图像技术识别煤和矸石,国内尚属先例。 2、填补领域空白:是一种智能化的煤矸石自动分选系统,其中的煤矸石图像识别算法和软件在国内还没有应用的先例。 3、与现有选煤方式相比,具有自动化程度高、造价低廉、环保节能、降低能耗等优点。 4、非常适合在选煤现场实时使用。

作品简介: 本课题组研究并设计了一种基于直-9系列直升机的应急逃生系统。当直升机遇到紧急情况,须弃机逃生时,飞行员启动本装置,通过抛舱门-固定人、弹座椅、弹射伞、速开伞等过程实现安全着陆。系统的主要组成为:舱门定向抛离模块、座椅弹射模块、射伞模块、快速开伞模块、人-椅固定与分离模块等。该项目首次提出了将侧面双向弹射与迅速开伞有机结合的直升机逃生系统设计思路,填补了单旋翼和双旋翼均适用的直升机逃生系统研究空白。
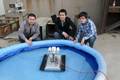
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。
