














搜索

作品简介: 跟随已有的黑线路线行进,在碰到障碍物时采取相应的避让行动,“看见”光线而跟谁它移动,锦上添花的发光行为,两只眼睛应用仿生学原理加上巧妙地机械设计,使得模仿出人眼的转动的度数约45度(不至于眼睛转到后面去了)使得电子眼时时注意着黑线,随着外界环境的变化而做出相应的反应实现智能化。
作品简介: 多功能电打火割枪:可以实现单手控制整个操作过程,电打火点燃燃气,切割规格图形。
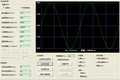
作品简介: 激光陀螺以其成本低、寿命长、可靠性高、动态范围大等优点成为惯性导航领域的一种理想器件,然而,作为其核心结构的光学谐振腔存在损耗,并且损耗大小直接关系到激光陀螺的精度性能,严重制约了激光陀螺的应用。但是,业界相应的损耗测量仪器的性能以及测量结果的准确度,却没有统一的衡量标准。针对这个问题,本发明设计了一套激光陀螺谐振腔损耗信号仿真系统。

作品简介: 作品针对出租车拼车计价问题,由拼车计价器和车外显示系统两部分组成。拼车计价器采用单片机控制,将乘车状态划分为单乘状态和拼车状态。软件方面根据设定的计费方案,计算出不同乘客的车费,并进行显示、打印。车外外置显示系统由触摸屏(或小键盘)、车顶LED屏组成。显示系统由单片机控制,输入模块可选择乘客目的地,帮助拼车乘客了解出租车的行驶方向。作品在设计计费方案和节能减排方面进行了积极的探索。

作品简介: 本作品通过把机器人系统模型简化为若干个标准模块化构件的不同组合装配,得到各种构形的机器人,并在其上搭建模块化机器人分布式控制系统,根据具体的工作任务和工作环境,组合装配出相应的机器人构形完成具体的工作任务。

作品简介: 本机器人集全球定位系统、ARM控制平台、人体红外感应、超声波测距、摄像头等功能模块于一身。机器人可以利用全球定位系统通过谷歌地图,结合超声波蔽障功能顺利到达指定坐标点,同时可进行数据采集、侦测伤者、摄像头照相等搜救工作。并根据需要将各种环境信息及图像信息及机器人各部分工作状态(如车速,超声波工作状态,电源电压等)传回ARM或PC控制平台,以确保高效、高质量的完成救援任务。

作品简介: 全自动小广告清除,方便、快捷、环保。

作品简介: 建筑减震与加固的重要性。

作品简介: 本作品为无线打卡机系统,因考虑到在公交车在发车收车及线路中途的一些站点司乘人员要下车进行记录,在这其中很可能造成交通的拥堵,交通的混乱,而且对司乘人员的人身安全也造成了极大的危害。我们的作品将用在公交系统(特别是中巴车)采用打卡方式对行车时间进行监控,这种方式需要司乘人员在行车路线的某个固定车站下车到打卡机上打卡,一方面需要乘客等待一段时间,另一方面也给司乘人员的工作带来了不便,及所产生的危险。
作品简介: 该设计的多功能推车利用了折叠、伸缩、转换、三角形固定、磁力等机械结构,综合了手推车、人字梯、平板车、一字梯的功能,将此四项功能融合为一体,并拥有独特的载重攀爬台阶功能。
作品简介: 本文提出回字形建筑概念,通过理论结合实例,分析其在建筑文化内涵和抗震理念两个方面的特点及优势,希望回字形建筑这一中国元素在以后的 建筑设计中广泛被采用。
作品简介: 本项研究研制了波长扫描凹面光栅机构,用于制造各种光学分析仪器。确定了直线位移与波长之间的关系。倒线色散率<10nm/mm。初始S=0, 角度45 º。 直线位移S与波长λ之间的关系[X= 1-(dλ)2]: S= WF=[140×Sqr(2)×dλ×Sqr(X)-10×Sqr(2)] / [1-2dλ2+2×dλ×Sqr(X)]

作品简介: 将专用阀设计阀体、阀芯两部分

作品简介: 此方案设计的侦查排爆机器人能够实现两路视频图像的无线传输,经采集卡用上位机在电脑上显示实时图像,通过两路视频可以准确定位.控制部分是基于windows 操作系统用电脑键盘远程控制小车的运动以及机械手的操作,并可发送特定的指令,应变能力比较强。另外,我们机器人采用的是闭环控制,可以在上位机显示三轴加速度传感器反馈来的机械臂的运动信息;压力传感器反馈来的机械臂夹紧信息.

作品简介: 金属陶瓷是在金属基体中加入陶瓷颗粒粉体制得 又称弥散增强材料,其独特的性能具有广泛的使用价值,而该作品可以实现克服现有制作方法的缺点,使用比较轻便灵活,同时节约能源、经济环保,还可以按一定比例进行混合。能够实现自定量均匀混合的,制备组织均匀、颗粒细小的,金属陶瓷复合材料。利用该装置能有效改善金属与陶瓷之间的混合均匀性和界面相容性,提高金属陶瓷复合材料结构和性能稳定性。

作品简介: 运用3D立体成像技术制作侦查系统,让观看者有身临其境的感觉,能更好的对场地进行有利判断。侦查机器人还配装有破障和取材功能,破障功能可以使侦查机器人在多种地形中不受限制的移动,同时在机器人上安装一只多自由的机械手和一只可切换功能的组合臂以实现取材功能,可完成多种复杂工作。

作品简介: 通过对比性实验,找出不同水灰比、不同再生骨料取代率以及不同活性掺合料对再生混凝土抗压强度的影响规律。利用线性回归,对普通混凝土配合比设计中的鲍罗米公式进行修正,得到再生混凝土的鲍罗米公式,为再生混凝土配合比设计理论依据,为再生混凝土的实际应用提供参考。

作品简介: 本设计采用微控制器,通过软件滤波和自动控制理论算法使得小车达到平衡状态。系统的传感器采用角度传感SCA61T,和陀螺仪采集小车车身的水平状态值和小车的加速度值。并且采用了LM298双桥大功率集成驱动芯片来驱动电机,无线遥控来控制小车的数据传输。依靠这些可靠的硬件设计,使用PID 闭环控制算法和卡尔曼滤波算法 ,使得整个硬件结构和软件系统能顺利匹配。从而使得小车能保持直立自平衡状态。
作品简介: 为提高实验室PCB板腐蚀效率,自动化控制腐蚀装置工作方式,快速充分的腐蚀PCB板,将实验室单一、耗时的做板方式提升到批量腐蚀,减少人为工作量和准确充分完成腐蚀。该腐蚀装置引入自动化控制,可准确的控制腐蚀液温度,控制腐蚀时间。齿轮上下传动带动腐蚀架,可使PCB板达到被溶液冲刷的效果,从而充分腐蚀。

作品简介: 机器人通过传感器识别路径,检测前方是否有障碍物,综合处理后规划行走路径,并通过可人为调整视角的摄像头采集现场信息。适用于大部分人无法进入的工作环境,如进行设备巡视、工程探险勘测、军事侦察、煤矿井下勘探、排雷排爆现场信息采集、抢险救灾、实时跟踪及一些需要引导的情况等。
上一页 1 2 3 4 ... 66 67 68 69 70 71 72 73 ... 122 123 124 125 下一页
