














搜索

作品简介: 一款用于高楼发生火灾等意外情况时逃生用的装置,也可以用于高空作业。
作品简介: 本项目拟以四氢呋喃(THF)水合物的形成为原理,建立一种常压下天然气水合物抑制剂性能评价装置,其原理及操作简便,能够代替高压条件下大型的仪器设备方法,用于适应广泛的天然气抑制剂的评价研究。

作品简介: 双雪花机器人是通过改变自身形状,由重力作为向前翻转的动力源带动机构前进。电机起的作用是改变机构外形,该机构是多边形结构,通过电机的往复正反转可以改变机构重心位置,然后由重力做功向前翻转。这种设计概念非常适用于复杂地形的运动,此时克服自身重力比克服地形阻力要相对轻松一些。 在控制上,应用可以带动两个直流电机的L298N芯片来实现电机正反转的控制功能。

作品简介: 扫撮一体机为将传统扫地过程的扫、撮、搬动一体化,从根本上改变扫地方式的新颖的扫地工具。它可连续单向工作,大幅度提高扫地效率的同时也明显降低了扫地中的劳动强度。另外,将通常的敞开式或半敞开式的撮子改成封闭状,基本消除了扫地过程中的扬尘现象。

作品简介: 该实验对原有的灌水器加以改进和加工,从而制造出新型的低压地下滴灌灌水器,并通过均匀性试验、压力—流量试验、土壤性能测试实验、土壤水分入渗实验对制成的新型灌水器进行性能调试与测定。试验结果表明:新型灌水器工作压力低、运行耗能少、抗堵塞性能强。

作品简介: 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
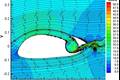
作品简介: 后置横流风扇升推力综合翼是一种将横流风扇融合进厚翼型后缘附近的上表面,利用风扇的吸附作用抑制气流分离并同时产生推力的新概念机翼。这种机翼创新性地将升力和推力紧密地联系起来,并且通过横流风扇进行机翼上表面的流动控制,达到增升的效果。在横流风扇的作用下,该机翼在较大迎角下不仅不会失速,反而能产生较高的升力和推力。另外,厚翼型的采用使得机翼的内部空间相对充裕,这在实际应用中具有很大的意义。

作品简介: 外骨骼机器人是一种可以进行穿戴的助力型机器人。其在结构上通过对人体的仿生,并加以特定的控制,以达到同人体随动、负重的目的。其在救灾、负重、行军、医疗等领域都具有广泛的应用前景。 国际上,已有像美国、日本等国家从事该项目的研究并有定型型号投入使用,但国内距离实际应用还有一定的差距。故此,我们小组研制了这套简易的外骨骼机器人,预期目标实现负重行走和牵引行走这两项基本功能。

作品简介: 该移动式自主救援避障机器人的研究项目属于国家级大学生创新实验项目的内容。主要立足于当前中国煤矿,地震等灾害事故频繁发生,现场的情况又十分复杂,为了避免对人产生二次伤害,我们需要一种可以帮助人们前往救援现场的机器人。不难看出,机器人代替了人的作用,所以我们项目主要解决的问题就是如何如何实现机器人的自主避障,控制机器人进行运动,如何携带传感器装置检测现场信息,如何携带救援物品进行救援等。

作品简介: 作品应用于电源测试。提出了以AVR单片微机处理器为核心的硬件技术路线,设计驱动变换主电路,外扩直流电压、电流信号的采集、光电隔离等检测电路。设计了PID控制算法与SPWM波相结合的软件系统,实现了电压同频同相的闭环跟踪;实现了纯阻性负载下的恒电流、恒电阻及恒功率的自动闭环调节功能,响应速度较快。采用了有源逆变、并网控制、并网电流正弦化等关键技术,实现了电能回收再循环利用,节省能源。

作品简介: 双向爬管(杆)机器人,通过控制驱动电机的正反转,可以在管或杆上实现双向自由爬动,操作简单、维护方便。

作品简介: 以低碳环保为目的,研究利用报废冰箱压缩机为核心部件,其他废旧物品为辅助零件研发、制作便携式空气压缩机,并最终制作出成品。使其能为家庭小型充气设备充气,携带方便,经济适用。并向市场推广、申报专利。
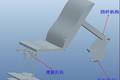
作品简介: 通过对现代生活的观察积累和进行的社会调查,我们小组发现,在城市中随着生活节奏的加快,工作压力的增大,大多数人几乎没有时间进行健身与养生,从而导致了身体健康状况的下降,并因此引发了各种疾病。我们针对这一系列问题设计出了多功能养生健身椅,此产品用于室内的健身和养生,主要功能为缓解颈椎疲劳、休闲瘦腿、舒适减腹。

作品简介: 图书馆取书器适用于一般人群,本产品较轻,可用于全国各地图书馆(书架较高,不易拿取高层图书)。 产品结构分为三部分:上部分为夹书部分,为本产品主要动作部分;接着向下是传动部分,是带锥齿轮的轴;最下面是手柄,是作品的施力部分。

作品简介: 随着社会的发展和文明的进步,人们越来越关注生活水平的提高。一方面,人们希望从日复一日简单繁重的家庭劳动中解放出来,有更多的时间和精力去从事更有意义的活动,以更轻松的余暇和心情享受更为丰富多彩的业余生活;烹饪机器人就是人们尝试解决这一问题的装置。我们的烹饪机器人是基于LabVIEW虚拟仪器编程,用NI的PXI6251进行信号传输控制的。其所有的控制电路及程序的开发均由我们自主设计研发。
作品简介: 在转向、夜间行驶和异常条件下的行车,驾驶员能否按照规定打开相应的车灯,或相应的车灯能否按照驾驶员的意志打开,进行正常工作,是分析道路交通事故发生原因的重要影响因素。在发生两车或多车碰撞的交通事故中,汽车照明灯和信号灯往往会被撞坏,甚至破碎。双方事故当事人经常就车灯是否开启问题发生争议,如何通过技术鉴定的手段,解决事故车辆在发生事故时车灯的技术状况和使用状态的问题,就是本实验要探讨的

作品简介: 该传感器系统设计实现了对粉体和颗粒等速度的快速、准确测量。测量结果受干扰程度小且测量系统成本低。在化工、能源、粉体传送等过程工业的检测与产品质量控制方面具有广阔的应用前景。同时,该传感器系统可为气固两相流的科学实验研究提供重要的测试手段。
作品简介: 提升接驳地铁的公交线路服务水平,可使地铁未覆盖区域的乘客以便捷舒适的方式通过公交车进入地铁。为了探讨枢纽公交站点位置和枢纽公交发车时间的最优方案,以最小走行距离和最小等待时间为目标,建立了枢纽公交站点位置和枢纽公交发车时间的优化模型,并给出了求解该模型的算法。以北京地铁4号线西苑交通枢纽为例进行分析,结果表明:采用优化方案后,换乘平均走行距离和平均等待时间分别减少88.83%和32.04%。

作品简介: 在我国现有道路资源有限的情况下,规划BRT时往往重点考虑BRT优先运行条件而忽视了BRT对其他社会车辆的影响,造成社会车辆通行效率低和延误过大。本研究从交通组织的角度运用交通管理技术,合理进行交通组织,目的是协调BRT与社会车辆在道路通行资源上的分配冲突。通过设立交通管理原则、提出交通管理策略、制定交通运行方案,建立一套较为完善的面向BRT的交通管理模式。

作品简介: 本文根据广州亚运会安保实践,对典型的公安临时交通检查站驾驶员、民警行为进行了相关调查,分析了目前检查站存在的各类问题,通过调查数据计算和数学模型定量分析对公安临时交通检查站的人员配置、交通设施、追缉布控系统进行了设计和规划,并对不同公路等级的公安临时交通检查站做出标准化方案设计,其目的是为最大程度地遏制驾驶员冲卡行为发生,有效预防无意识冲卡现象出现。
上一页 1 2 3 4 ... 107 108 109 110 111 112 113 114 ... 122 123 124 125 下一页
