














搜索

作品简介: 通过光敏元件传感器和控制算法实现光运动机器人的设计。

作品简介: 本次所设计的装置是一种能一次性生产出三层互相包裹的食品的装置。本作品主要是利用一个主装置、两个侧装置挤出机体,令两个侧装置在先后不同的方位与主装置相连接,连接部位开口,让其中不同种类的食品围绕主装置中食品进行一层一层的包裹,从而解决了三种不同品种的食品或三种不同颜色的食品组合在一起,搭配不规则或者形状不均匀,在视觉上达不到美观且消耗时间和人力的问题。
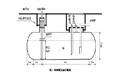
作品简介: 加油站由于地基变形等原因,使得灌容表标定值产生偏差,因此需要对罐容表进行重新标定。本文应用实验数据拟合,以及微元法研究了储油罐发生纵向变位、横向旋转时对罐容表的影响,通过采集的数据对储油罐进行变位识别,实时计算实现罐容表的重新标定。

作品简介: 本产品在原有机械变速器基本结构不变的情况下,通过加装微机控制的自动操纵机构,取代原来由驾驶员人工完成的离合器分离与结合操作,从而实现离合的自动化。

作品简介: 本项研究研制了波长扫描凹面光栅机构,用于制造各种光学分析仪器。确定了直线位移与波长之间的关系。倒线色散率<10nm/mm。初始S=0, 角度45 º。 直线位移S与波长λ之间的关系[X= 1-(dλ)2]: S= WF=[140×Sqr(2)×dλ×Sqr(X)-10×Sqr(2)] / [1-2dλ2+2×dλ×Sqr(X)]

作品简介: 本作品为一款柔性的五指灵巧手,能够实现人手的基本动作,完成简单的操作。 本灵巧手通过研究人手的医学解剖结构,最终尺寸与正常成年男子左手的尺寸十分接近,自由度可以达到32个。可以应用在极限或有害环境下帮助人类有效地从事科研、生产等活动;在服务方面,由于拟人型造型,本作品比其他机器手更容易被人们所接受;医学上,设计制造接近正常人手尺寸的灵巧手,有利于为手部残疾的患者更好的假肢提供技术参考。

作品简介: 本作品属于一种医疗辅助器械,具体为一种满足液体浸泡与紫外线表面照射两种消毒方式选择并实现体温计快速清零的装置。采用成熟的离心技术和紫外线杀菌技术,有效简化了体温计的消毒清零过程。功能全面,成本适中,可广泛推广于各大中型医院,具有很好的实际应用和市场价值。
上一页 1 下一页
