














搜索

作品简介: 该远程无线反恐机器人是基于Intel Core Duo双核和研祥EC5-1719CLDNA单板电脑研发而成。它主要应用于危险环境及狭小区域的检测以及危险物品的排除,根据前方反馈的视频信息远程控制排爆作业,使排爆人员的生命安全得以很好的保障。

作品简介: 这种搬运机器人主要应用于LCD生产制造过程中玻璃基板的传送,联结前后段制程的传输,以及各制程中的玻璃基板的交换与传递。 本作品是一种空间6自由度混联机器人,主体部分是3-RRS并联机构,具有一个大范围平动自由度和两个转动自由度。
作品简介: 本作品集上肢康复和下肢康复为一体,基于人体工程学原理进行了机械臂的设计,并采用磁流变电机与力矩电机串联增加康复的安全性,同时对肌电信号、血氧饱和度等生理参数进行在线监测;运用计算机网络技术让患者可根据康复医师的远程设定进行康复训练;医师同时监控多个患者的康复训练过程大大降低了对康复训练医师数量的需求;身临其境的虚拟现实技术大大提高了康复训练的积极性与效果。实验表明,网络化一对多远程助老助残康复机器...

作品简介: 本设计采用ZigBee无线传感器网络和SimpliciTI网络实现计算机终端对机器人进行无线控制与定位。通过组建ZigBee无线传感器网络,将大量无线的传感器节点组网,计算机终端可与机器人之间进行无线数据传输,不仅能够对机器人工作环境进行实时数据监测,而且能够对机器人无线控制以及无线定位。 经测试:机器人在发出命令到动作时间平均响应时间为0.8s;在室内的环境下无线操控范围距离小...

作品简介: 移动机器人移动平台的设计与运动控制技术的研究是整个移动机器人系统研究的两大重要组成部分,它将为移动机器人更高层次的理论与方法研究提供一个可靠的实验平台及基础。开发研究以工业、国防及服务业等领域为应用背景的,且易于用户二次开发的移动机器人平台具有很好的市场潜力和研究意义。 本课题结合现有机器人结构形式的优点,创新性的提出一种机器人行走机构形式,设计了一种新型的关节履带加履带足的复合式机器人行走机构...
作品简介: 叶片轮式蛇形机器人采用叶片轮驱动,比一般的蛇形机器人具有更好的翻越和攀爬能力,能够适应各种复杂的地面环境,同时具有结构简单、操作方便、速度快、成本低的特点。 该机器人由控制者通过无线摄像头传回的图像进行遥控控制,能够脱离视线范围工作,根据环境的不同可搭载不同的传感器完成各种任务。主要可用于地震废墟下搜救伤员,在军事上侦察敌情,公安部门反恐,核工厂、危险化学药品生产工厂危险区域检测...

作品简介: 采用嵌入式芯片通过手持遥控设备或个人计算机通过无线遥控的方式实现整个机器人的控制。用于高空处人无法攀登或危险性比较大的管状结构的勘察。用于维修管道结构建筑,以及以机器人为平台,可以搭载可燃性气体传感器和温度传感器等;当管道有泄露现象时,通过传感器检测确定,然后向控制人员发出报警,并通过无线数据传输模块发回检测数据。 随着现在空中管道布局越来越复杂,我们的这款全向外管道检测机器人将为各种管道检测修...

作品简介: 新型多用途反恐防暴机器人可对人口密集的场合或交通枢纽、信息中心、政府机关等关键场所进行安全保卫和事态防范工作。 该机器人可携带有效载荷150kg,最大速度为72m/min,可在草地、沙滩等复杂路面上行走,攀爬40°斜坡,翻越30cm高障碍。车载无线通讯系统可保障在3000m范围内进行无线图像信号的可靠传输和运动控制信号的有效传递。发射器云台可实现360°的水平运动和45°的俯仰运动...

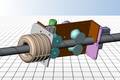
作品简介: 管道机器人是管道缺陷检测的有效工具,因此成为国内外科研机构的研究热点。管道机器人在运行过程中,机器人的行走速度控制是一个难题,速度的大幅度波动将影响检测精度;能源(电能)不能及时补充,制约了机器人的最大检测距离。 针对目前存在的技术问题,研制了一种新型管道机器人——流体驱动、速度可控式管道机器人。该机器人利用流体的压力能实现行走功能,通过双闭环实时调速单元实时调节摩擦轮与管壁间的...

作品简介: 本项目主要以单片机处理技术为核心,采用串口通讯、无线通讯和多传感器融合等技术,通过智能算法实现机器人自主搬运、太阳能自主采集、能量无线补给、机器人之间协同作业以及上位计算机无线监控等任务。 作品分五部分:(1)搬运机器人采用智能算法自主寻线,辨识装卸位置,伺服控制装、卸,完成自动搬运任务。(2)太阳能机器人通过红外和碰撞避障,远红外追光,太阳能板多自由度摆位以及智能导航,并实现光线...

作品简介: 水上垃圾收集机器人立足于旅游景区、城市内河等狭长的静水水域,着力解决目前缺少高效率、高安全系数的打捞设备而给水面垃圾打捞带来的种种问题。本设计融入了无线遥感技术,图像采集和视频传输技术、液压传动技术、单片机控制和行程控制技术,实现了人船分离的收集模式,节约了大量的人力和物力资源。切实解决了以上所涉及水域的垃圾打捞难题,项目将受到各个因缺少专业打捞设备,给水面环境的治理带来极大困难的环保机构的青...

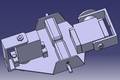
作品简介: 管件相贯线广泛应用于空间钢结构、海洋采油平台、造船等行业,其相贯线形状及焊接坡口切割质量直接影响着施工质量。管件相贯线不仅形状复杂,而且其上面的焊接坡口角随着相贯线位置不同而变化,手工切割难以保证质量,通常需要数控切割。 现有的数控相贯线切割机体积庞大、难以在施工现场使用;运动复杂(需要4~5个自由度)、价格昂贵(几十万,甚至上百万人民币),广大中小型钢结构企业主要依靠租赁方式使用该数控...

作品简介: 该作品巧妙利用平行四边形机构构型变化总长不变的特点,提出一种全新的履带变形机器人移动平台,具有很强的越障、爬坡、地面机动能力和行驶平顺性,且结构简单、运动稳定、控制可靠,可适应复杂地形环境,满足反恐、排爆、搜索、救援、侦察等任务对微小灵巧移动机器人载体的需求。

作品简介: 向导机器人是一种电子向导,可以在指定的陌生环境中给用户提供直接的导引。向导机器人给用户做向导的同时,还会根据自己运行的实际位置,利用自身携带的多媒体设备介绍当前位置附近用户可能感兴趣的信息。

作品简介: 本产品区别于以往同类型机器人,利用连续负压原理,采用多腔体吸附结构,具有对壁面结构形状适应能力强,稳定性好,不受壁面材料限制,移动灵活等特点。有很好的应用前景。
作品简介: 多功能线缆机器人是一种能在线缆(钢索)上自动行走的智能机器人,实现了线缆检修与除冰功能;它可以对斜拉桥、悬索桥钢索、电梯、土木施工升降机、矿井升降机、吊车等设备钢索线缆进行损伤检测,也可以针对严寒地带输电线缆、斜拉桥、悬索桥钢索等进行除冰,有效地为生产生活服务。在机器人爬升结构设计方面,本项目开发了一种锥面自锁夹紧机构,并对夹爪夹紧力、弹簧预紧力等进行了严密的力学分析;该机构能满足机器人爬升...

作品简介: 两轮共轴自平衡机器人是一种倒立摆闭环控制系统。根据两轮机器人车体的倾斜角度驱动两个共轴轮让机器人始终保持直立状态。在这个系统中机器人的重心远高于共轴轮子的轴心。机器人的倾斜角度由三轴加速度传感器与单轴角速度传感器测量,AVR单片机根据机器人的倾斜角度计算出合适的驱动力,再由编码减速电机驱动轮子让共轴双轮高重心机器人始终保持平衡状态。

作品简介: 随着计算机网络以及图像处理、网络传输技术的飞速发展,为视频监控技术提供了很大的发展空间,经历了模拟监控、数字监控、智能监控发展过程。同时随着人们物质生活水平提高对家居安全、生活安全要求越来越高,据不完全统计国内安防市场产值预计将达到2000亿元,国家也提出相应的政策,包括“平安城市”、“无线城市”、“3111工程”建设,旨在构建一个安全和谐平安的社会。 本系统正是基于这种背景,分析了现在主...

作品简介: 该识别搬运机器人利用传感器准确找到并分辨出已标记的物体,经过控制部分计算分析,控制安装在机器人上的机械结构,将物体转运至指定位置,实现智能分类装卸、搬运的目的。该作品作为一种现代化智能装卸运输的初步研究方向,其前景在于使得工厂、车间、码头等货物运输搬运场所搬运智能化,减少人类劳动,实现全面智能化管理。

作品简介: 作品以井下及危险环境的探测与搜救为背景,设计开发出一种可适应不同路面条件的新型关节—履带复合式智能机器人。机器人由机械本体、控制单元、信息采集模块、数据远程传输及处理模块等组成,通过CCD及多种传感器的实时信息采集,实现路径自主选择及环境数据探测。
