














搜索

作品简介: 两轮共轴自平衡机器人是一种倒立摆闭环控制系统。根据两轮机器人车体的倾斜角度驱动两个共轴轮让机器人始终保持直立状态。在这个系统中机器人的重心远高于共轴轮子的轴心。机器人的倾斜角度由三轴加速度传感器与单轴角速度传感器测量,AVR单片机根据机器人的倾斜角度计算出合适的驱动力,再由编码减速电机驱动轮子让共轴双轮高重心机器人始终保持平衡状态。

作品简介: 随着计算机网络以及图像处理、网络传输技术的飞速发展,为视频监控技术提供了很大的发展空间,经历了模拟监控、数字监控、智能监控发展过程。同时随着人们物质生活水平提高对家居安全、生活安全要求越来越高,据不完全统计国内安防市场产值预计将达到2000亿元,国家也提出相应的政策,包括“平安城市”、“无线城市”、“3111工程”建设,旨在构建一个安全和谐平安的社会。 本系统正是基于这种背景,分析了现在主...

作品简介: 该识别搬运机器人利用传感器准确找到并分辨出已标记的物体,经过控制部分计算分析,控制安装在机器人上的机械结构,将物体转运至指定位置,实现智能分类装卸、搬运的目的。该作品作为一种现代化智能装卸运输的初步研究方向,其前景在于使得工厂、车间、码头等货物运输搬运场所搬运智能化,减少人类劳动,实现全面智能化管理。

作品简介: 作品以井下及危险环境的探测与搜救为背景,设计开发出一种可适应不同路面条件的新型关节—履带复合式智能机器人。机器人由机械本体、控制单元、信息采集模块、数据远程传输及处理模块等组成,通过CCD及多种传感器的实时信息采集,实现路径自主选择及环境数据探测。

作品简介: 抗震救援机器人是针对地震发生时的特殊工作环境设计的一种装备。它采用履带行走,具有双臂结构,集剪、抓、扒等功能于一体,效率高、重量轻。可以采用空投等方式快速投入灾区,充分利用黄金救援时间,挽救废墟中幸存者的宝贵生命。该机器能够在废墟上行走,并可在复杂、恶劣的震后现场连续作业,可根据具体的环境情况施展相应的救援手段,操作方便,确保了救援人员的生命安全。其双臂结构,既可以单臂独立工作,又可以双臂配合工作...

作品简介: “矿用救灾蛇形机器人”是针对我国地矿资源丰富,赋存条件复杂,频发矿难和震灾的现实研制的。作品主要用于矿灾或地震后极端环境的探测搜救工作。作品体积小,结构简单,能实现模拟生物蛇的多种真实运动形态,其各电路模块具有保证井下瓦斯环境下的本质安全和自安防爆功能。通过智能系统的控制和搭建传感测量系统,能进行灾后极端环境下的多维时空事故信息探测和人员搜救,为抢救方案的制定决策提供最直接依据,有效节约挽救矿难人...

作品简介: 本作品以清洗用水作为唯一的动力源,利用水射流所产生的负压特性实现机器人在清洗壁面上的吸附,利用水压驱动的活塞附以连杆机构实现机器人的直行、转弯等爬行动作,并利用水浸式超声波去污原理实现壁面的清洗。所研制的机器人因其质量小、可靠性高、供能方式简单等优点,非常适用于高楼外墙清洗,现场试验也证实了该机器人的实用性和可靠性。
作品简介: 阐述智能机器人科技制作课题的设计和实施;解析机器人作为发展学生科技创新才能的有效资源,研讨电子信息技术整合智能汽车技术理念,对培养大学生综合实践技能和创新思维的重要作用;综述智能避障机器人制作系统结构硬件和软件控制原理;归纳实践技能和创新思维科技竞技成果;探讨进一步扩展智能机器功能的实践途径。

作品简介: 在当前反恐、防暴已成为一种新的作战模式,具有很强的特殊性,需要对多种形式目标实施快速、准确火力突击。据武警部队对反恐、防暴案例的统计:移动目标射击达34.3%,隐显目标射击达37.1%,静态目标射击仅为2.2%。研发具有远程遥控、无规律变速曲线运动、快速隐显、自动报靶功能的靶标,是新形势下实弹射击训练的迫切需求。 “实弹射击远程遥控靶标机器人”创新点及技术先进性: 1、采用无线双向通信方式,实...

作品简介: 数控气动爬梯子消防机器人,采用气动作为动力,基于单片机控制,用气缸带动连杆机构,使两幅钩子交替有序抬起、伸出、落下,实现机器人自动沿梯子上下爬动的动作。应用仿生学原理,用机械方式模仿人手爬梯子的动作而设计的,其结构简单,动作可靠,实测表明该控制策略可行、响应快速。这种新型机器人在很多领域有着广泛的应用潜力。

作品简介: 康复机器人是机器人技术在医疗方面的新应用。在我国,康复医学工程虽然得到了普遍的重视,但是康复机器人研究仍处于起步阶段,所以康复训练机器人有广阔的市场前景。基于虚拟现实的上肢康复训练机器人系统不仅可以利用机器人对病人进行康复训练、数据记录、分析和掌握病人的康复情况,而且采用基于虚拟现实的辅助训练软件,通过虚拟环境来鼓励患者积极主动地参与康复训练,从而提高康复训练的效果。

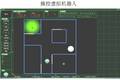
作品简介: 本项目目的在于制造能快速、准确实现任意轨迹并且造价低廉的机器人,具有计算机图形输入、自动生成驱动程序等功能,可以进行二次开发。 用户通过计算机输入特定图案,相应软件自动生成程序代码,以驱动电机完成任务。因任意图案均可看成由直线和圆弧组成,故可以开发实现直线和圆弧的通用程序,以达到任意轨迹的目的。因此,系统结构紧凑简单、可靠性强,可进行时时在线调整,成本底,可以应用于大型线条图案的低成本绘制、...
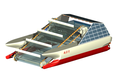
作品简介: 该设计针对性地解决了景区封闭水域,以及不适合现有大型垃圾船工作的水面(如小型水库、港口等)垃圾清理问题。主体选用兴波阻力小、水上面积大的双体船结构,“两岸号”也由此得名。全机采用电力驱动,太阳能电池辅助供电,环保节能。无线电遥控操纵可实现简便高效的清理工作,配套起吊、运输皮卡车,可以流动作业。整体造型简洁美观,将改变人们对环保机械比较肮脏简陋的传统观念。本机产品化后,可以取代目前的人工打捞...

作品简介: 作品为一台履带式ROV水下作业机器人,为采矿,水体污染过滤清理,管道维护的专业领域设计制作,多功能,专业化。实现水下自由运行和水底爬行的功能。开发水下巡视功能,如海洋输油管道检查;跨江、跨河管道检查;船体检修;船底探查;码头及码头桩基、桥梁、大坝水下部分检查;航道障、港口作业;钻井平台水下结构检修;水下考古、水下沉船考察等一系列应用。开发清洗功能,如泳池,水池,水箱的不换水清洗,解决传统清洗水资...

作品简介: 本作品综合了已有蛇形机械结构,设计出了拥有自己特色的蛇形结构。添加摄像头、可燃气体传感器、机械手等外设,实现多种环境下的工作能力。 蛇形机器人由于适应性较强,因此拟定其用于矿难、地震、管道等环境下的环境检测及紧急救护。

作品简介: 本作品为基于双PLC智能控制系统的螺旋式前进机器人,可利用超声波对管道进行无损探伤,并将探伤波形进行实时传输和智能分析。

作品简介: 通过自主创新,我们设计了基于类GPS红外全局定位系统及单目视觉处理的导航系统。在新环境中通过简单配置可完成机器人的精确定位,实现全局环境中的自主避障移动。 基于创新的导航系统设计的智能巡航机器人结合完备的软件与硬件系统,可实现基于互联网控制、自动巡航、监控系统、自动报告GPS定位、语音手语识别、自动监控、异常状况识别与反应等功能。机器人使用先进的全向轮及无线网络传输设计,移动灵活...

作品简介: 研制具有人类行为特征,可以模拟人类行走与操作功能的机器人是长久以来人类对机器人研究的梦想之一。“漫步者”双足机器人基于给定轨迹的步态规划方法,分析描绘出线形机器人的行走过程,参考步态轨迹来规划行走轨迹,最终实现模仿人类行走的功能。

作品简介: 可伸缩叶轮式爬楼机器人是基于车辆-地面力学理论,借助单片机控制,具有动力源,采用蜗轮蜗杆减速电机驱动,安全可靠。圆轮-叶轮变换机构根据行星轮系中行星轮轨迹多样性,采用弧形杆与行星小齿轮固结,实现圆弧杆的收缩。通过控制行星轮系中太阳轮与行星架的转差,实现圆弧杆收缩程度可调,使机器人可以在一定范围尺寸变化的不同楼梯上爬行。 可伸缩叶轮式爬楼机器人作为一个无障碍平稳移动平台,其载重能力比较强,基于...

作品简介: 移动机器人研究是机器人学中的一个重要分支。多移动机器人协调技术又是移动机器人研究的一个重要方向。随着科技的发展,多移动机器人系统的协调问题已成为一个新兴的研究热点,本项目将针对多机器人编队控制技术进行实践性探索,将对目前原有的理论成果进行验证,并开拓创新,提高技术水平。 本项目是以自主研发的基于ARM920T嵌入式系统的智能机器人为平台,加入传感网络系统,无线传输系统,图像采集处理系...
