














搜索

作品简介: 该智能遥控巡逻车具有自动和手动巡逻检查仓库,并能通过手工制作的机械臂对物体进行手动和自动搬移的功能;它能够通过鼠标定位技术准确定出在仓库中的位置,并实时向上位机软件发送视频图像;是一个可以在恶劣的仓库中代替人完成巡逻、搬运物体的工作的智能机器人。

作品简介: 在发生火灾等危急时刻,防盗窗可通过打开其安全锁,使其在重力等一定作用及操作下,通过曲柄圆柱铰链接连接的防护栏将缓慢向下伸展成楼梯状,可供人员逃生。而后又能通过回拉滑轮上的绳索使窗户缓缓上升并恢复到原来形状,从而在正常情况下达到防盗作用。

作品简介: 目前,果农往往借助于梯子这一工具实现采摘过程。这样的方式不仅降低了采果效率,而且存在一些安全隐患。我们设计的采果器可以让果农站在地面上就能轻松实现采摘。

作品简介: 此设计的主要内容就是设计一种半自动的便携型扫地机,主要适用于学校,庭院或小型街区的道路清扫。

作品简介: 本发明在于实现一种紧急情况下,快速逃生的装置,该装置要满足以下要求:1)、紧急情况下可以逃生;2)、创新合理,设计合理;3)、节能高效,不用电等能源,制作成本低 本发明设计了一种在公共场合使用的高效逃生门,紧要时刻用力拍按钮,卡圈向外翻转脱离按钮,所有板靠自身重力沿导轨按钮,卡圈向外翻转脱离按钮,所有板靠自身重力沿导轨下滑至底部,人可以从门框内逃出,按钮自动弹回。

作品简介: 本作品通过开发一款接触器分析设计软件对接触器运动特性进行仿真分析,并设计与之匹配的高效节电模块,将传统接触器进行改造成节能型接触器。经过改造后的接触器具有节能效果显著,运行可靠性高,使用寿命延长等特点。

作品简介: 本缓降器采用了液压减速原理,通过以盛群半导体公司的HT46F49E单片机作为核心计算单元控制的液压减速系统,采用机电结合的方法使物体以最优的运动方式下降,其下降过程由单片机内部程序根据外围的输入信号控制。我们要实现的下降过程是迅速而又安全。
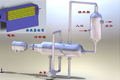
作品简介: 该系统利用发电厂、化工厂、水泥厂等的余热废气在系统内首先经由加热器对工质(高压气体)加热,推动涡轮机高速旋转,随后工质通过冷却器冷却,使工质温度达到较低温度,再通过压气机等一系列部件的工作,最终使发动机内轴高速旋转,带动发电机发电。该装置工作效率可达30%以上(工质在200℃左右),是一种适合企业使用的废弃热能发电装置,成本较低,节能环保,适于推广。

作品简介: 要实现手动制动和自动返回,而且一定得是单股绳索承担下落(原因在后面的系统优势里面),人就要带着缠绕绳索的滚轮下来,安全带可连接于滚轮。可将滚轮的轴当作手把,在轴与滚轮之间安装制动装置,即实现手动制动,滚轮内部有弹簧发条,以实现装置的自动返回,绳索上端安装报警器,待滚轮返回后报警器被触动自动报警以提醒等候人员。

作品简介: 本作品是专为清理河流湖泊及海面上的漂浮垃圾而设计的。机械化的设计不仅无需外加动力,美观的外形也成为水上一道靓丽的风景线,亦可起到宣传环保意识的作用。
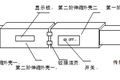
作品简介: 本作品由两个相距一定距离的传感器,无线数据传输,编程单片机,预警器等组成。该装置有外挂装置可直接悬挂在道路护栏上,当有车辆驶过时,两个传感器会同时接受到回波,判断有车辆通过,并通过单片机激发预警装置报警,从而提醒装置后方的人员有前方有车辆通过。该装置可用于道路施工区,抛锚车辆的安全预警,此外,该装置可与任何一种安全系统及无线遥控与远程控制等系统兼容,可以单独控制道路路灯,栅栏机或铁卷门等。

作品简介: 本作品是以泰世330X型四旋翼飞行器为实验平台开发的微型飞行器飞控系统。此系统可以实现飞行器的姿态控制,通过遥控器通道设置中断开关能够实现自主飞行和遥控模式的切换,可以通过PC 形成小型简易的地面站,具备一个简易的无人机作战平台基本要求。主要指标:飞行控制范围80米;飞行高度在10米之内;俯仰和滚转角度控制范围是30度;航向角度控制范围是0到360度;具有一定的智能避障功能。

作品简介: 本作品在现行试验的基础上研发了一种不受海拔条件影响、容器内水温保持在100℃的GAR-1型沸煮容器,克服了现有试验方法存在的缺陷,完善了在高海拔地区低气压环境条件下水泥安定性检测的试验操作方法,填补了国内外在水泥性能检测上的一项空白。

作品简介: 一种应用于宿舍和办公室的多用途的新型插板。
作品简介: 本设计采用吸尘器原理和卡套式思路相结合,由一个9V 直流电源即可带动,利用鸭嘴式吸口可将板擦四周粉尘吸入粉尘盒中。该电路通过排气口排出定量空气形成了内外的压强差异,再通过向心力将吸口处粉尘吸入。 其外观,利用卡扣方式将本装置固定在现有黑板擦背面,方便拆卸与清洁。本装置的结构简单,方便携带,除教学应用外,还可用在认为无法到达的地方的清洁。

作品简介: 基于停车位混乱管理的现状,设计出的全自动车位锁利用RFID射频识别技术进行对车辆的自动识别,接收器收到信号对信号进行判断,若为有效信号则向单片机发出指令,单片机动作,再利用太阳能以光伏电池板发电,从而驱动电机,以实现车位锁的开启和关闭,能够完全脱离手动控制。在投入生产后,该设计的成本将会大大降低,能获得一定的经济收益。本设计硬件合理、软件可靠,理念智能、使用方便,具有实现意义。

作品简介: 跟随已有的黑线路线行进,在碰到障碍物时采取相应的避让行动,“看见”光线而跟谁它移动,锦上添花的发光行为,两只眼睛应用仿生学原理加上巧妙地机械设计,使得模仿出人眼的转动的度数约45度(不至于眼睛转到后面去了)使得电子眼时时注意着黑线,随着外界环境的变化而做出相应的反应实现智能化。
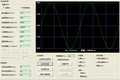
作品简介: 激光陀螺以其成本低、寿命长、可靠性高、动态范围大等优点成为惯性导航领域的一种理想器件,然而,作为其核心结构的光学谐振腔存在损耗,并且损耗大小直接关系到激光陀螺的精度性能,严重制约了激光陀螺的应用。但是,业界相应的损耗测量仪器的性能以及测量结果的准确度,却没有统一的衡量标准。针对这个问题,本发明设计了一套激光陀螺谐振腔损耗信号仿真系统。

作品简介: 本作品通过把机器人系统模型简化为若干个标准模块化构件的不同组合装配,得到各种构形的机器人,并在其上搭建模块化机器人分布式控制系统,根据具体的工作任务和工作环境,组合装配出相应的机器人构形完成具体的工作任务。

作品简介: 本机器人集全球定位系统、ARM控制平台、人体红外感应、超声波测距、摄像头等功能模块于一身。机器人可以利用全球定位系统通过谷歌地图,结合超声波蔽障功能顺利到达指定坐标点,同时可进行数据采集、侦测伤者、摄像头照相等搜救工作。并根据需要将各种环境信息及图像信息及机器人各部分工作状态(如车速,超声波工作状态,电源电压等)传回ARM或PC控制平台,以确保高效、高质量的完成救援任务。
