














搜索

作品简介: 本作品主要功能为还原任意错位三阶魔方,机器人为类人机器人结构,整个系统具有良好的稳定性和较高的重复定位精度,能够适应各种光照环境,可以在50s之内还原任意错乱的魔方。机器人采用人机交互方式和观众进行互动,并配有语音提示系统。

作品简介: 目前有关危岩崩塌灾害预警多数从灾害体及其环境表象出发,不能实时获取危岩崩塌信息。因此,本项目基于断裂力学,构建了危岩稳定性计算方法,从危岩崩塌信号出发,采用三维应力采集器实时获取危岩崩塌的原始信息,通过构建的稳定性计算方法计算危岩的稳定性,最后再结合危岩安全评价标准,实时判别危岩所处的安全状态,将危岩的安全状态最终以不同颜色灯光和鸣笛等显示的方式实时公布。

作品简介: 目前我国煤矿井下除尘存在效率低、盲点多、投入成本高等问题,本设备的推广应用可以有效解决上述难题。设备集自动控制、安全、高效于一体,能有效降低井下煤尘粉尘浓度,改善作业环境,降低尘肺病的发病率和粉尘爆炸概率。 本设备已委托XX省科学技术情报研究所查新,结果显示:目前,生产具有上述特点的除尘设备产品,国内所查文献,未见提及。且已获得国家专利(ZL201020529358.0)。

作品简介: “十二五”规划纲要指出:绿色发展,建设资源节约型、环境友好型社会,改善民生,提高住房保障水平。作为大学生,我们有责任和义务去了解国家政策,关注民生,利用所学知识,思考低碳宜居住宅的设计。作品根据该市气候特点,地域文化特色,从自然中寻找灵感,以“绿色”为启迪,源于生活的认知与体验,提出设计理念,并将其用于方案设计中。但愿,环境可持续发展、住宅健康成长,但苑,低碳宜居住宅。
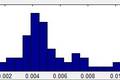
作品简介: 本装置利用自主搭建的光路系统,一方面测量光经过样品前后的光透过率;另一方面用一个显微CCD拍摄颗粒图像,进行数字图像处理,用统计的方法得到颗粒的粒径分布,再结合Lambert-Beer定律和光透过率,利用Mie散射理论计算不同粒径颗粒的小光效率因子,就可以计算出空气颗粒浓度了。

作品简介: 臭氧软开关电源以高效节能为目的,采用了新型主电路拓扑结构并采用DSP作为主控制器,实现了逆变电路各个开关管的ZVS和ZCS软开关功能,降低了装备能耗,提升了开关管的可靠性。DSP通过PSPWM移相调节,实现了输出功率可调,从而可实时调节臭氧产量和浓度。采用了负载电流频率跟踪技术,使负载工作在串联准谐振状态,提高了臭氧产量和浓度以及电源转换效率。采用触摸屏实现了电气参数显示和故障诊断等功能。

作品简介: 全方位喷射灭火器,是仔细观察人们在使用各类灭火器的不便而产生的产品设计想法,是直接面对市场的创新设计产品。其全方位喷射功能是目前所有灭火器都无法实现的,能使灭火器在各种状态下达到全方位有效喷射的目的。另外,有效提高灭火器的使用率,使灭火器的使用价值大大提高,提高了灭火器的性价比。同时,操作非常简单,适应于未经灭火器使用培训的所有人群。

作品简介: 本作品是针对矿难、地震等搜救的专用机器人,采用轮腿结构作为行走机构,轮腿半径的可变化设计可进一步提高机器人的越障能力,整体结构的仿生设计使机器人能够更稳定的适应复杂地形。搭载温度、气体等模块化传感器,通过无线通讯可实时传回灾难现场信息并通过人机界面显示。人体红外检测传感器与摄像头组合工作,辅以三自由度平台,可精确搜索到被困人员。独特的欠驱动营养液输送机构可针对特殊情况对被困人员进行营养供给。

作品简介: 这是一把新型等离子弧发生器。针对目前等离子弧发生器价格昂贵,结构复杂的现状,通过对国内外等离子弧发生器结构的分析,提出采用双锥形夹紧器和零部件几乎全部采用回转体结构等一系列优化改进措施,提高了电极对中度和枪体冷却效果。设计理念上,在保证等离子弧发生器质量的前提下,尽可能使结构简单、体积更加精小、降低制造难度、减小加工成本。本发明对等离子弧发生器质量的提高和成本的降低起到一定的积极作用。

作品简介: 实验用非织造布热粘合及涂层联合小样机的研制

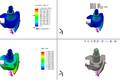
作品简介: 仿人按摩机器人手臂是国家863计划项目(服务机器人)中的一个子课题。它是以传统中医按摩理论为基础,结合机器人定位精度高,按摩力量精确可控,动作可准确重复,不会产生疲劳等特点,来构建中医按摩机器人平台。服务机器人的出现可以有效的缓解医务人员不足的现状,提高老年人和残疾人的生活质量,同时其设计思想也可应用在工程机器人、农业机器人、军用机器人以及各种需要代替人手臂的领域。

作品简介: 在工业生产过程中,工件的装夹往往是一对一进行的。目前,市面上还没有出现一对多的夹具,这极大的影响了企业的生产效率和效益。 仿手指的自适应柔性夹具就是针对这一情况量身定做的。这种自适应柔性夹具能在一定范围内,对于形状复杂的工件,这个夹具都能完成比较精确的装夹。

作品简介: 本产品主要运用于农村集中供水、工农业自动供水现场。通过采用太阳能电池供电,解决了现场无外部供电或需要长距离接线供电的问题。系统通过太阳能供电技术和无线通信技术,节约系统材料成本与安装成本,降低系统后期故障率,保证了工农业供水自动化。

作品简介: 目前投入市场的管道机器人多用于清洗行业,用于管内检测较少。由此急需一种无线自动控制的管内检测机器人来满足市场需求。 该检测机器人采用新颖多段式机构和无线控制模式,采用连杆、万向轮等机构使其机动灵活,利用单片机对驱动电机进行差速控制转向。机器人主要由驱动系统,CCD图像采集系统及无损伤检测的涡流检测系统等组成。 可应用于石油、煤气、化工、水利、锅炉等行业的管内精确检测等工作

作品简介: 一种新型西瓜成熟度无损检测仪,提供了一种可以对西瓜成熟度进行无损检测的,快速准确的测量方法,克服传统检测方法费时,可靠性差等缺点。同时操作简单,方便快捷,便携式设计,不仅适用于水果市场及大型商场,为消费者的放心选购提供人性化服务,同时可以作为一款居家伴侣,为人们的健康生活提供贴心呵护。

作品简介: 本项目主要对六个大类九种产品(电动泵用单向轴承、深井泵用单向轴承等)进行外观创新设计,形成了国内外首创非标单向系列轴承关键核心技术体系。在结构上,确保了结构简单、精密度高、互换性强;在效能上,在实现高效节能的同时,能够保证较高的轴向、径向负载和稳定性。该系列产品已形成规模生产,出口到意大利、马来西亚、印尼等。例如:船用单向轴承的年需求量约为20万套,直接经济效益2000多万元。
作品简介: 本作品主要研究设计了一种液压耦合锚杆及其配套的监测装置,设计的锚杆是在普通金属锚杆的尾部安装一种可调控的液压装置,使其能够与围岩形成“初期支护、合理让压、二次补强”的循环耦合作用,且配套的监测装置能够对巷道围岩受力进行实时监测,为实现煤矿安全高效生产提供条件。

作品简介: 在物质水平突飞猛进的今天,人们对健身和运动的需求愈加明显,对健身器械的要求不仅是能够实现简单的身体锻炼,还要能够对身体进行调节和预防一些疾病。该爬行锻炼机通过四个爬步带——两个上肢和两个下肢爬步带的连续运动,手掌和脚底分别与爬步带接触,使用户在上面实现多种爬行锻炼。该设备具有广泛的实用性和适用性,可用于多种人群;应用场所也比较广泛,例如:家庭的日常锻炼,医院的康复治疗,健身会所等。
作品简介: 莱洛三角形截面钻杆在边长及其宽度的正方形内旋转,旋转运动规律由设计的行星齿轮机构控制,切削出方孔。转速快、效率高、稳定性好。

作品简介: 本设计利用CCD、步进电机等,经数据采集、机械控制系统的制作,光路、电路的设计,装配成测量仪的硬件,仪器将USB接口采集到的图像经CCD图像传感器转换为可用输出信号;使用VB.2010开发了仪器软件,利用计算机并口发送步进电机控制指令,实现仪器载物台的计算机精确控制,对聚焦所得的清晰图像进行分析,利用长度法计算接触角,误差小于0.05°,以不同探测液下的接触角值为基础可计算出材料表面能。
