














搜索
作品简介: 针对目前农村劳动力人口锐减,以及过量施用化肥与农药,所引起的社会与环境的双重问题,本课题研制了一种基于机器视觉技术的新型田间管理机器人。该机器人能完成对田间多类耕作项目的智能作业,同时节省农药、化肥使用量45%以上。本项目已申请实用新型专利一项,发明专利一项,并提交了一份软件著作权申请。

作品简介: 同轴双阴极五元素阴极灯能同时1次测量得到血液中五种元素的含量,经典的空心阴极灯需要5次测量才能够得到血液中五种元素的含量。本方法测量方便快捷,节省血样,解决的关键科技问题是每测量一个元素换一个灯的问题。1滴血1次测量得到血液中5五种元素的含量,经典的空心阴极灯需要5滴血5次测量得到血液中5种元素的含量。

作品简介: 本作品充分考虑油田生产现代化、数字化管理的需求,以及现有自动化监控系统的问题和缺陷,设计了适合现代油田信息化、数字化管理的实时监控系统及合适的通讯组网方案,可实现井口电参数及压力、示功图等各种生产运行数据的实时采集分析,对于提高产量、节能减排、减少故障,以及油田提高生产管理效率等有着重要的意义。该系统基于其明显的功能优势,有很强的市场竞争力,有很大的市场空间和很好的推广前景。

作品简介: 本系统利用ATP生物发光法实现了致病菌微生物的检测,是一种即时的检测方法,检测过程简便、快速,几分钟内即可完成。系统通过微处理器控制实现自动位移控制,光强的高速数据采集,计算机结合标准模型数据建立结果分析的数学模型。实现了ATP微生物检测的实时智能化。检测速度快,结果准确可靠。

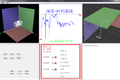
作品简介: 项目是由ICPF材料驱动的超微型仿生机器鱼,可由3V低电压驱动,具有体积小、无噪音、无水分解、成本低、生物亲和力很强等特点。作品对毫、厘米级水下微型仿生机器人的设计方法和控制方式进行研究,进行了运动和动力学建模。使用ICPF低电压“生物型”驱动器作为仿生机器鱼的动力装置,通过内置控制电路和微传感器实现了基于反馈控制的水下三自由度游动、避障、主从通讯及鱼群信息交互。在各领域具有广阔应用前景。
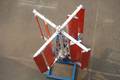
作品简介: 本作品设计了一种集海洋风能与波浪能开发于一体的浮海型混合发电系统。采用模块化设计思想,立轴风力发电装置与波浪发电装置设计成可独立运行的模块。立轴风力发电模块与波浪发电模块安装在浮体平台上,通过锚泊浮于工作海域。本作品走多能互补道路,实现了风能和波浪能的综合利用。

作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
作品简介: 本作品旨在研制一种利用水声遥控方式控制的水下机器人验证机,该技术涉及到多学科领域。水声遥控系统采用性能优异的水声信道编码技术,使得水声遥控可靠性得到显著提高。通过所建立的动力分配数学模型,控制8个推进器电机的旋转方向和旋转速度。在人工操控条件下控制验证机的姿态和运动,使载体更加适应机器人水下作业。

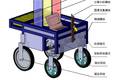
作品简介: 此设备由柴油机提供动力源。通过带传动,齿轮传动带动刀具轴运动,完成清除冰雪的功能。此设备的创新之处在于:1.除雪破冰的刀具是通过其离心力的作用达到清除冰雪并具有一定的避障功能;2.刀具清理下来的冰雪通过后面的滚刷将其扫到路的一侧;3.刀具是铰链连接,具有一定的回旋功能,若路面有凸起,则刀具将反向运动,并且刷子的刷毛为钢丝的,能减少对路面的损伤及降低更新速度。
上一页 1 下一页
