














搜索
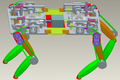
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。

作品简介: 涌突水是地下工程的主要地质灾害之一。实践表明,注浆方法是涌突水封堵治理的有效技术手段。但是动水注浆理论尚不成熟,尤其是裂隙动水条件下浆液扩散和封堵机理研究不足。针对上述问题,研发了准三维裂隙动水注浆模型试验台,经过试验分析,首次提出水泥浆液的U形扩散规律和分层分区扩散机制,得到浆液的快速析水沉积原理和沉积留核扩散规律。在此基础上,形成了以浆水比为核心控制因素的裂隙涌水注浆封堵新方法。

作品简介: 课题研究内容是研制一种以陶瓷球为热载体的内螺旋式滚筒热解反应器,通过滚筒的直径和转速与螺旋的螺距之间的配合来增强热载体与生物质粉间的传热,在确定的反应时间内提高生物质粉的加热速率。结合热载体、热解气、炭粉分离装置,除尘装置,冷激装置,陶瓷球热载体循环及加热装置,开发出具有自主知识产权的陶瓷球热载体循环内螺旋式滚筒热解反应器实验设备。
