














搜索

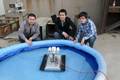
作品简介: 针对现有水下航行器采用螺旋桨推进并以鳍舵进行操纵控制的运动方式无法满足在低速条件下具备较好的机动性和稳定性的需求,且功耗较大,航程不够远等特点,结合水下扑翼机器人和水下滑翔机而开发的一款仿海龟推进、采用扑翼推进并带滑翔功能的机器人。该机器人同时具备了上述两种新型水下航行器的高机动性、高效率、低功耗、远航程等特点,目前国内尚未见有此类机器人工程样机的报道。该机器人可用于海洋资源勘测与环境调查等方面。

作品简介: 作为救援破障类机器人,“祥龙”成功弥补了现有蛇形机器人普遍存在的工作环境单一、动力供应不足、耐高温性能差、翻倒无法复位等不足。 “祥龙”具有稳定性好、横截面小、柔性好、翻倒自适应、防水防尘、耐高温、可远程遥控等特点,可以在多种复杂地形上行走,在水、火中有较高工作能力,低廉的制造成本也为大规模应用提供了条件。在救援、探查、星球探测等方面具有广阔的应用前景。

作品简介: 本机器人使用移动互联网络通讯技术远程控制机器人,使机器人完成浇花,室内监控等工作。为经常出差,家里又无人照顾花草的人士解除后顾之忧。 由于通过互联网络通讯来控制机器人,使得遥控距离不受限制,只要有互联网环境就可以控制机器人完成工作。

作品简介: 本设计中的智能抢险探测机器人以ATMEL公司的ATMEGA16L单片机为控制核心,实现智能控制和智能救援,包括跨越“受损桥梁”、测量并计算桥梁高度、道路选择、智能避障、路面寻线、金属检测、金属拾起及放下、声光报警、时间、高度显示等功能。

作品简介: 主动嗅觉机器人是根据仿生学原理,依靠自身电子鼻对运动轨迹上的多个点气体浓度进行检测,根据检测结果结合搜寻算法决定下一步的运动方向直至找到气源。主动嗅觉机器人技术能够解决爆炸物搜索、毒品检测、灾后搜救、火灾报警、危险气体检测等问题,具有广阔的应用前景。多功能远距离主动嗅觉机器人能够根据实际环境,装载不同的设备模块,切换搜索模式。在无线传感器网络和辅助机器人群的帮助下实现与控制基站的远距离通讯。
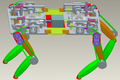
作品简介: 本作品将游龙板的反偏向轮运动形式创新地应用于机器人运动控制研究领域,具有开拓意义;本机器人通过两臂开合时轮子与地面产生的摩擦力前进,运动灵活敏捷,水陆均可驱动;实现了红外测量侧方及前方障碍物和道路宽度、调整两臂摆幅以适应道路宽度变化、灵活转向避障(侧面及前方)、遥控、倒车、多机协同前进等功能;可用于水陆两栖机器人、侦察机器人、舞蹈机器人等实际应用领域,也可作为血液中微纳米机器人运动原型实验平台。

作品简介: 目前市场上音乐机器人种类数量较少且演奏效果一般,本项目融合电子、机械、乐理等相关知识,搭建了一支基于Arduino和Bluetooth技术控制的机器人乐队,并自主开发了一套可调试、编曲、播放的音乐机器人软件。乐队由电吉他、架子鼓和电子琴等演奏机器人组成,并能够以USB有线连接或蓝牙无线通讯方式在主控PC机控制下完成乐队的协奏。自主研发软件可将Midi和Gtp格式音乐文件转换为音乐机器人运行程序。

作品简介: 蔬菜管理机器人利用太阳能光伏板为机器人各个系统的运行提供动力能源,通过光纤传感器根据设定路线智能行进,先进的低温溶氧杀菌系统能够科学诊治病虫害,有效杀灭病原微生物。机器人通过视觉系统进行果实颜色与形状的识别,确定果实的位置,控制行进位置和机械手臂的采摘功能,并能完成自动充电,自动调节和监测蔬菜生长的温度、湿度和光照,进行无公害蔬菜的管理采摘。
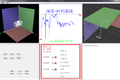
作品简介: 本四足行走机器人采用双轴电机驱动十二个凸轮,实现四足行走机器人的协调运动,较好的模拟出了四足行走机器人在真实情况下的运动。

作品简介: 十字绣机器人是专门针对十字绣这类双面绣法工艺而研究的类人手机器人,是采用双头针,双綉臂,无底线的绣制工艺,其技术特点是采用首创的带张紧装置的双綉臂结构上下刺绣的方法,使用双头单针,无底线的纺织技术,在工艺上做到上綉臂将针带线完全穿过布面;下綉臂接住针,将针带线完全拉出布面,然后张紧,进行绣制工作。为纺织行业填补了一项空白。

作品简介: 针对传统无人机集群编队飞行在对大面积区域精确探测遇到的问题提出了一种全新的解决方案,即通过多个无人机自主拼接组合和分离,提高长时间集群飞行的可靠性,增强无人机群飞行稳定性并提高飞行效率。在对大面积目标进行探测和侦察时能够提高侦察效率和精度。
作品简介: 本多功能水下作业机器人是一种广泛用于各种水文信息采集、水工结构检修、水文地质勘测,河道勘察,水产养殖等方面工作的通用工具,由履带驱动装置、沉浮装置、视频传输装置、传感器、推进螺旋桨、方向控制装置、扭转平衡螺旋桨、信号线、中央控制系统、数据输出设备及水体监测附属装置组成。 该机器人可以快速、高效的采集包括水深、水温、水流速、河流含沙量等水文信息并对水文地质环境和水工建筑物实时监测。
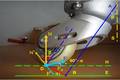
作品简介: 本作品旨在研制一种利用水声遥控方式控制的水下机器人验证机,该技术涉及到多学科领域。水声遥控系统采用性能优异的水声信道编码技术,使得水声遥控可靠性得到显著提高。通过所建立的动力分配数学模型,控制8个推进器电机的旋转方向和旋转速度。在人工操控条件下控制验证机的姿态和运动,使载体更加适应机器人水下作业。

作品简介: 在消防现场存在着爆炸、有害气体泄露、建筑坍塌及核辐射等众多不安全因素,该作品主要用来解决在如此复杂环境中消防人员亲临火场时的人身安全问题。消防机器人的开发应用可以让消防人员不进入火场,通过消防机器人的自主灭火或消防人员的远程控制即可扑灭火灾。通过将自动控制、人工智能等的综合运用,该机器人实现了自动巡检、报警、灭火等功能,同时又可起到火灾预警功效,防止火灾的进一步扩大,降火灾损失降低到最低。

作品简介: 现在已步入二十一世纪,机器人已逐步进入我们的生活,在现实生活当中,有着许多危险和繁重的工作,而如果能将这些工作交与机器人,将极大的解放人的双手,此项目就是从这点出发的,完成一个自动拾取网球的机器人,利用机器人来代替人工作。建立了一个完整的机器人平台,这个平台不仅仅只能用来拾取网球,而在这平台中,我们可以这个机器人做许多事,例如救灾,做家务等等。

作品简介: 本作品是在项目组汲取2009年利用机器人处置河南杞县钴-60卡源事件及广州番禺“国际罕见”钴-60卡源事故的成功经验的基础上,针对强辐射、高温、剧毒、易爆等高危环境进施工作业任务的特殊需求,以突发核事故应急保障能力建设对辐射环境下智能机器人系统的迫切需求为背景,综合应用智能机械,控制,通信,电子,辐射防护等多方面的技术,使该作品能在辐射、有毒、高温等危险环境下代替人实施环境监测与事故应急处理任务。

作品简介: 本项目以Linux为平台ARM为核心,加以测距传感器、红外蔽障、循迹传感器,摄像头以实现图像识别,配合一定的机械设备完成从发现到报警、响应,最终完成灭火操作。

作品简介: 煤矿事故发生后,环境的复杂性和危险性使得救援人员无法接近现场进行侦查或施救。本项目针对这一应用背景,设计了自组网煤矿救灾机器人,机器人采用多段履带可变结构设计,在复杂地形环境下具备优秀的通过能力;可深入井下通过自组网方式建立通信链路,以解决远距离通信的难题;机器人带有功能完备的环境监测器、生命探测器和音视频采集装置,实现事故现场环境的远程监测评估,为救援活动提供决策依据,有效地提高灾难救援的效率。

作品简介: 小型组轮式机器人足球比赛是RoboCup机器人足球世界杯赛的主要项目之一,同时也是机器人技术和人工智能理论的良好的实验平台。本项目设计制作的RoboCup小型组足球机器人竞赛及实验平台,可作为小型组足球机器人竞赛的标准平台推广应用,也可以作为功能完备的竞赛系统直接参加机器人足球比赛,还可在此基础上开展机器人技术实验研究,为机器人技术新算法、新模型提供创新实验平台。

作品简介: 作为山东大学机械设计制造及其自动化专业的学生,团队成员表示,非常荣幸参与第十八届"挑战杯"竞赛,项目团队以参赛为契机,将所学知识应用于实践、将灵感转化为产品、将创意项目落地实现,在扎实的创新实践中体悟“纸上得来终觉浅,绝知此事要躬行"的真正含义。"一代人有一代人的际遇,一代青年有一代青年的使命"。团队成员认为,"挑战杯"竟赛的意义绝不仅在于赛事本身,更重要的是为当代大学生提供了一个实践锻炼、施展才...
