














基本信息
- 项目名称:
- 气动式柔索清障机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
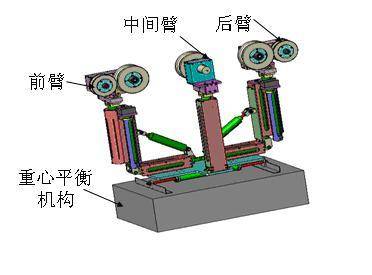
- 机器人以输电线路、架空索道等柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置,控制系统采用基于规则库的递阶式控制结构。该机器人可携带线路检测装置,完成柔索线路的巡检、清障工作。
- 详细介绍:
- 气动式柔索清障机器人以各种柔索线路作为行驶作业路径,整体由气动驱动,采用三臂结构,前后两臂结构对称,主要由柔性伸缩气动机械臂、行走驱动机构和铣削清障机构组成;三臂对称安装在机体平台上,平台下面悬挂以控制箱为配重单元的重心调节装置。控制系统采用基于规则库的递阶式控制结构,具有遥控和自动两种工作方式。 气动式柔索清障机器人可以在输电线路、架空索道等柔索线路上稳定行走,进行线路淤泥、覆冰等异物的清除,并且能够自动跨越输电线路上的防震锤、悬线线夹等主要障碍,同时可携带相关检测工具进行柔索线路的故障检测,并将信息传送到地面监控单元,确定故障发生的地点以及原因等,以及时进行线路维护。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1.创新点 1)机器人整体采用气动驱动,成本低、安全可靠、清洁无污染、安装维护简单,并且有效减轻了机器人的整体重量; 2)机器人三手臂均为折叠式机构,可实现大范围的跨越和整体回缩,通过模仿人体遇到线路障碍时,从线路下方越障的动作序列实现越障; 3)重心调节机构的设计,可实现重心的连续调节,从而保证了机器人越障过程的稳定性。 4)采用IPC+PMAC控制系统与传感器融合技术,实现了机器人的智能化控制。 2.技术指标 1)机器人整体重量轻,最大不超过50Kg; 2)具有一定的爬坡能力,最大爬坡角度40°; 3)能够在柔索上平稳行走,行走速度不低于15 m/min; 4)作业空间大,能够自主检测并跨越一定的障碍; 5)重心变化连续平稳,保证机器人越障过程的稳定性。
科学性、先进性
- 1)本作品将气压传动技术、清障技术与机器人巡检技术有机地融合在一起,创新设计了一种高效的基于气动驱动的柔索线路仿生机器人。与传统巡检机器人的电机驱动方式相比,气动执行元件速度快、动作灵活、安装维护简单、安全可靠,并且有效减轻了机器人整体重量。 2)机器人三手臂通过模仿人体遇到线路障碍时,从线路下方越障的动作序列实现越障。机器人折叠式的手臂机构,增大了作业空间,可实现大范围的跨越和整体回缩。与二臂回转式结构相比,三臂式结构不需要进行复杂空中位姿的调整,控制简单、越障过程稳定。 3)机器人三臂对称安装在机体平台上,平台下面悬挂一个以控制箱为配重单元的重心调节装置,可实现重心的连续调节,从而保证了机器人越障过程的稳定性。 4)采用IPC+PMAC控制系统与传感器融合技术,实现了机器人的智能化控制。
获奖情况及鉴定结果
- 2011.5 山东科技大学 山东科技大学第六届学生课外学术作品竞赛 特等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、产品、图纸、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.技术特点 1)本作品将气压传动技术、清障技术与机器人巡检技术有机地融合在一起,创新设计了一种高效的基于气动驱动的柔索线路仿生机器人,有效减轻了机器人整体重量。 2)三手臂均为折叠式机构,增大了机器人的作业空间,可实现大范围的跨越和整体回缩。 3)重心调节装置的设计,可实现重心的连续调节,从而保证了机器人越障过程的稳定性。 4)具有一定的爬坡能力,最大爬坡角度40°;能够在柔索上平稳行走,行走速度不低于15m/min。 5)采用IPC+PMAC控制系统与传感器融合技术,实现了机器人的智能化控制。 2.适用范围及推广应用前景 该机器人可携带线路检测装置,完成输电线路、架空索道等柔索线路的清障、巡检工作。同时,机器人与地面操作平台进行实时信息交换,可及时发现线路的损伤情况,确定故障发生的地点和原因,大大提高了巡检的效率和可靠性,从而提高了电网的可靠性和索道输送作业的连续化、自动化水平,为柔索线路的清障、巡检工作提供了新的有效手段,具有很好的推广应用前景。
同类课题研究水平概述
- 柔索线路作业机器人大体上可以分为两类:远程操作机械手和移动机器人。前者是一种半自动化的装置,可以协助人完成各种带电作业,但受地面交通条件的限制。第二类机器属于移动式服务机器人,多采用悬臂机构,与第一类机器人相比,有较大的优势。国外在该领域的研究起步较早,但这些机器人一般需要人工参与检测,或者只能完成两线塔之间电力线路的检查,工作范围小,自主程度低。 1988年东京电力公司的Sawade等人研制的光纤复合架空地线(OPGW)巡检移动机器人利用一对驱动轮和一对夹持轮沿地线爬行,遇到线塔时,先展开携带的弧形手臂,手臂两端勾住线塔两侧的地线,构成一个导轨,然后本体顺着导轨滑到线塔的另一侧实现越障。但该机器人机械本体平衡能力和环境适应能力差,难以实现控制,而且导轨约100kg,机器人自身过重。 加拿大魁北克水电研究院的Serge Montambault等人研制的HQ LineROVer遥控小车起初用于清除电力传输线地线上的积冰,逐渐发展为用于线路巡检、维护等多用途移动平台。小车采用灵活的模块化结构,安装不同的工作头即可完成架空线视觉和红外检查、压接头状态评估、导线和地线更换、导线清污和除冰等作业。但是,HQ LineROVer无越障能力,只能在两线塔间的电力线上工作。 国内关于输电线路机器人研究起步较晚,90年代末,国内的一些研究机构和高等学校开始巡线机器人的研究工作。在863计划的支持下,武汉大学、中科院自动化研究所等单位开展了巡检机器人中部分关键技术的研究。1998年,武汉大学吴功平教授研制出了架空高压线路巡线小车。小车采用单体三驱动轮结构,具有稳定的行走功能和越障功能,能顺利越过绝缘子、防震锤、悬线线夹等主要障碍物。但是巡检小车的行走、越障通过人工遥控加机械控制器来实现。 目前,中科院自动化所复杂系统与智能科学重点实验室研制的110kv输电线路巡检机器人采用二臂回转式悬挂机构增加了臂距调整机构、夹持轮抱线机构等,可实现旋转、俯仰等运动功能,爬坡能力强。但它的行为规划复杂,增加了控制电路设计及运动控制的难度。 综上所述,该类作品的研制已显现出强劲的技术优势,随着机器人功能的不断完善,其结构将会更加灵活、更加轻巧,探测灵敏度和可靠性会进一步提高,尽快试制成功并投入产业化已是大势所趋。








