














基本信息
- 项目名称:
- 餐饮服务机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
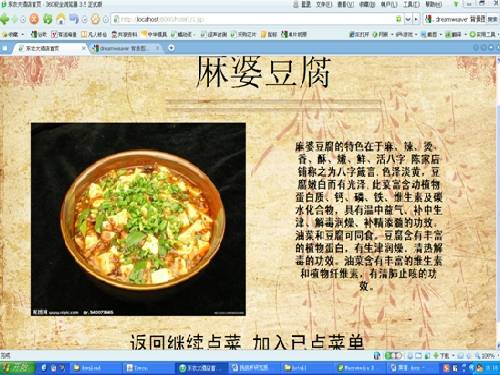
- 目前我国正面临用工荒的问题,如果引进餐饮服务机器人不仅可以减少运营成本,缓解人员紧缺的局面,还能实现老板的轻松管理。 本作品适用于大中型餐厅、酒店。她能代替服务员完成多媒体交互式迎送客人;人机交互式点菜,以多媒体形式介绍客人欲点菜特点;代替服务员自动移动到目标餐桌上菜;接收客人呼叫信号;辅助服务员作为餐后碗碟自动运载工具等大量的服务工作。
- 详细介绍:
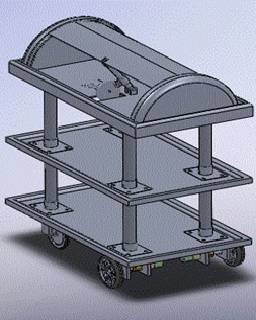
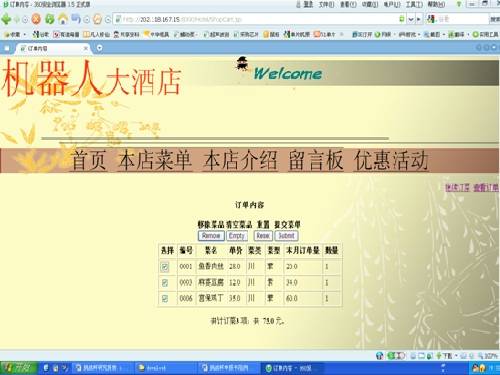
- 机器人机身上设置有人机交互界面,操作简便,连接输入装置,客人只要输入菜品的序号就可以实现点菜功能,然后机器人进入厨房,机器人体内有若干菜品盛放位置,厨师做完菜后,将菜品放入机器人体内,并输入菜品信息,机器人记录下菜品在体内的摆放位置,然后通过内部程序确定目标餐桌,返回大厅并通过导航装置和识别功能找到目的地进行上菜。内置的无线接收系统能够使机器人感应到餐桌的呼叫并及时前往进行服务。 餐厅大厅有机器人待命的区域,没有服务请求时所有机器人都在这一区域内等待。当某一餐桌上的顾客按动服务按钮时,总控制台向其中一个闲置的机器人发出命令信号,机器人前往指定餐桌进行服务。点菜完毕后,机器人向厨房发送点菜单信息,厨师做好后向闲置的机器人发出命令信号,机器人前往后厨接收菜品后进行传菜。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
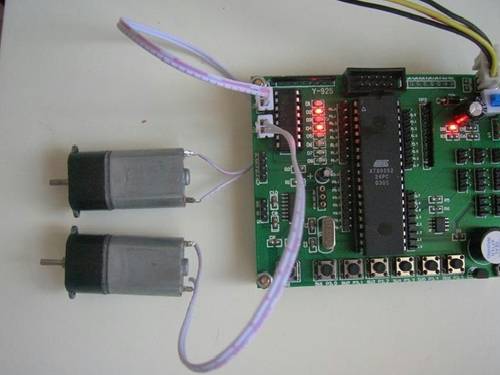
- 设计目的:目前我国正面临用工荒的问题,这也必将导致员工工资的大幅上涨。面对这些问题,如果饭店购进若干餐饮服务机器人不仅可以减少运营成本,缓解人员紧缺的局面,还能实现老板的轻松管理。机器人服务员不但能提高服务效率还可以打响饭店门号,使消费者慕名而来。 基本思路:服务员机器人具有如下功能,多媒体交互式迎送客人;点菜,以多媒体形式介绍;代替服务员自行走到目标餐桌上菜;辅助服务员作为餐后碗碟自动运载工具。机器人的体系结构分为交互系统,控制系统和执行系统,餐厅中的多台机器人与总控制台之间互相联系,每台机器人都通过总控制台传递信息。 创新点:功能方面,基于机器人和网络技术的餐饮服务系统,包括点菜、传菜、迎宾服务智能机器人和餐饮管理软件。技术方面,“自动导航模式”下,应用光学检测传感器测量和定位,图像传感器探测障碍。解决了传统机器人寻迹导航的不便和车轮滑转造成的误差。在设计了随动助力系统。 技术关键:光学检测传感器非标记位移参数测量技术,软件插补算法精确定位导航技术。基于matlab图像处理软件的障碍物识别技术。在“非自动导航模式”和“路径学习模式”下:的随动助力检测和控制技术。 主要技术指标:机器人自动导航误差小于0.1m/100m。障碍物识别距离:1~2米。机器人外形尺寸:700mm×420mm×700mm。机器人移动速度:0.5~1.5 m/s。供电电源:DC12V,24AH。行走驱动方式:双电机(2*20W)。10寸触摸屏。服务器最大终端数:128台。
科学性、先进性
- 现有的餐饮服务机器人大多为人形,运送菜品数量非常有限,效率不高,而效率相对比较高的送菜机器人确是采用循迹的导航方式,这样就需要在地面铺设路标,很难在丝毫不改变餐厅原有装修风格的情况下进行机器人定位与导航。 本项目采用了电子地图匹配与图像处理技术结合的方式,既保证了运动精度又不改变餐厅装饰。 在机器人的定位与导航方面,本项目借鉴了光电鼠标的工作原理。这样,只要记录脉冲数,通过数据的处理可以就能够计算出X,Y方向上的位移分量,实现在电子地图中的定位与导航。为此我们设计了鼠标定位精确度试验,对试验数据分析后发现在鼠标芯片处理速度允许的情况下,定位精度满足了本项目应用环境的要求。 本作品还应用了视频与图像处理技术。机器人的视觉系统可以更放方便的检测运行方向上的障碍物,做到提前准备,有效避免与障碍物的撞击事故发生。
获奖情况及鉴定结果
- 暂无
作品所处阶段
- 实验室阶段
技术转让方式
- 暂无
作品可展示的形式
- 实物、产品、模型、图纸、现场演示、图片、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品适用于大中型餐厅、酒店。她能代替服务员完成多媒体交互式迎送客人;人机交互式点菜,以多媒体(图形文字和语音)形式介绍客人欲点菜特点;代替服务员自动移动到目标餐桌传菜、上菜;接收客人呼叫信号,及时自动前往所需餐桌与客人简单交互传递客人需求到服务员,并主动反馈服务人员的答复;辅助服务员作为餐后碗碟自动运载工具等大量的服务工作。 服务类机器人具有广阔的市场,目前中国机器人产业正处于上升阶段。目前服务类机器人被公认为是未来最具发展潜力的新兴产业之一,机器人行业正在实现大跨越。 目前我国正面临用工荒的问题,很多饭店也出现了服务员人手不够的情况,这也必将导致员工工资的大幅上涨。餐饮服务机器人以其独特的优势,无论是从经济角度考虑还是从创新性考虑都是对餐厅老板有着不小的吸引力。
同类课题研究水平概述
- 在人民生活水平不断提高、科技日新月异的时代,机器人将逐步走入人类的日常生活,与人类友好共处,是未来社会生活发展的必然趋势。服务机器人系统技术不仅是智能机器人发展的前沿技术,也是引领人类未来生活新模式、培育机器人新产业革命的一种核心技术。 公共服务机器人近年来得到快速发展,并且已经应用到公共场所为人类服务。随着社会的不断发展进步,人们的人均收入提高,随之而来的是人们的消费水平不断地提高,从而大大地促进了餐饮业的迅速发展。在餐饮业领域,最繁杂的工作莫过于为顾客点餐和送餐等服务。由于人力成本的提高,餐馆在服务人员的人力成本支出越来越高,如在日本、香港,普通服务员的工资和产业工人的工资已经不相上下。如果使用机器人代替/部分代替服务员为顾客服务,如点菜、送菜,不但能提高服务效率,减少服务人员数量,更能建立餐厅特色,打造餐厅品牌,进而提升餐厅的业绩。餐饮服务机器人作为一类特殊的公共服务机器人,集成了移动机器人技术、多任务集成、人机交互等。因此,研究和开发餐饮服务机器人系统,不仅可以积累研发其他服务机器人的技术,具有重要的理论价值,还具有重大的实际应用价值和广阔的市场前景。 中国科学技术大学研制的机器人“可佳”在“2009 中国机器人大赛暨RoboCup公开赛——服务机器人比赛”上首次亮相,该机器人具备了一定的思考推理能力,能够完成一些较复杂的动作和语音识别等功能。该型机器人为通用型机器人,采用仿人结构,如只应用在餐饮行业则存在一定冗余部件与功能,且造价过高。深圳先进技术研究院在2009年开发了一款针对餐饮行业的服务机器人,该服务机器人以轮式移动平台为底座,上身部分为人形机器人,主要采用测距传感器信息与电子地图的匹配作为导航方式。该型机器人在导航方式上较视觉导航、路标导航、电磁导航等传统导航方式有更强的适应性且更易实现,但机器人的导航对桌椅的固定有很大依赖性,且该机器人为仿人外形,会浪费较多机身空间,一次只能上一盘菜品,效率较低。








