基本信息
- 项目名称:
- 基于地基激光雷达的单木位置和树高提取
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 数理
- 大类:
- 科技发明制作A类
- 简介:
- 该研究针对地基激光雷达数据的配准和过滤、单木位置和树高的提取,提出和采用了一系列数据处理和参数提取方法。首先利用偏差和回波对原始点云数据中的噪点、和非树干点等进行滤除;然后对点云数据水平分层生成灰度影像;Hough变换识别每层的树干点云,在此基础上提取单木位置;最后结合水平扫描点云数据提取单木树高,将所提取的单木位置和树高与外业实际测量数据对比,结果一致性较好。
- 详细介绍:
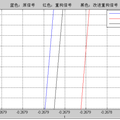
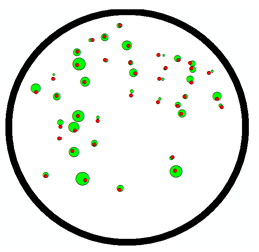
- 1 数据获取和处理 1.1 数据获取 数据获取所使用的地基Lidar系统为Riegl VZ-400,中心站只进行了一次垂直扫描,其余4站各进行了一次垂直扫描和两次水平扫描,各大站之间的相互重叠度大于50%。在所有站的扫描中,都使用全站仪测量出反射片的全球坐标,保证所有站都是在同一个坐标系统下测量,确保后期在RiScan-PRO软件中处理的精度。 1.2 数据处理 对原始点云的数据处理主要包括:噪点、多次散射点和非树干点的去除以及各站的数据配准等。 在密集林区,树叶间距离非常近,在几毫米范围内,可能小于激光点的间隔,而且随着距离的增大,激光点密度减少,所以产生这种处于歧义间隔内的多次散射点和林区一些非树干的噪点。数据配准前,先过滤掉这种噪点。 在Riegl获取的点云数据中,共包含四种回波,大部分树干点都来自于单一回波和尾回波,也有少部分树干点来自于首回波,在此保留包含大部分树干点云的单一和尾回波。 对TLS点云数据的配准过程如下:首先把全站仪测量的各站反射片坐标导入到RiScan软件中,保证所有站都是在同一坐标系下,把样区中心站向全球坐标配准,接下来各垂直站都向全球坐标和中心站粗配准和精配准;各大站的水平扫描在分别向对应的垂直站粗配准和精配准。 2 单木参数提取 2.1 单木位置提取 单木位置提取是单木参数提取的基础,在准确识别了位置之后,可以在位置基础上进行精确的树高提取。本研究采用二维Hough变换来识别单木,获取单木位置。该研究中,以方形样地中心测站的多站扫描和单站扫描情况分别进行了研究。 对于多站扫描情况,具体算法如下: (1) 合并所有垂直扫描点云。以中心站位置为圆心,选取10m半径内的所有点云,以该10m半径的圆作为研究区域,生成0.15m×0.15m的DEM。 (2) 对点云数据水平分层,层厚度为10cm,层间距为0.3m。每层都生成分辨率0.5cm×0.5cm大小的灰度影像,像素大小为该网格内包含点云的个数。从0.9m开始,共分成12层,生成一个包含12个波段的灰度影像,每个波段对应一个水平分层结果。 (3) 对灰度影像利用二维Hough变换进行圆检测,检测最小半径从3.5cm开始。对于同一位置,如果12层中有4层或4层以上能检测出圆,就认为该位置为单木,得到样地内的单木坐标。对于少于4层的检测结果,提取出来,利用椭圆拟合进行进一步的检测,最后结合椭圆拟合和hough检测中4层或以上结果,得到样地内最终的单木坐标。 对于单站扫描处理过程,除了不需要合并点云数据外,其它的操作和多站的操作相同。 2.2 单木树高提取 对于单站扫描的单木树高提取,因为使用的中心站位置只有一次垂直扫描,不能真实的代表单木的高度,所以树高提取时使用了多站扫描的点云数据。结合估测出来的单木位置与起始点云数据,进行树高估测。具体算法如下: (1) 从点云数据中提取出距离各单木位置0.5m半径范围内的数据。对于每一棵单木都提取出了以位置为圆心,半径为0.5m的垂直向整个圆柱体内的数据。 (2) 对于每个圆柱体,都从min(z)+3.5m开始水平分层,每层厚度为0.1m,z为每个圆柱体内的点云高程值。 n=(max(z)-(min(z)+3.5))/0.1 相当于把每个单木圆柱体都划分成n个0.1m厚的圆柱体体元。 (3) 遍历各个圆柱体内的点云数据,如果在垂直方向上,从k(k≤n-10)层开始,连续出现10层包含的点云量都小于一个给定的阈值,那么认为到了树顶,此时该单木的树高h=3.5+0.1*k。在n层数据中,可能会有不同的k值满足上述情况,在本文中取从下往上遍历时遇到的第一个满足情况时的k值。 (4) 因为该林区单木特别的密集,彼此之间遮挡很严重,所以有的单木在未到树顶时,因为点云量过少,满足第3步的情况而输出,此时有很大的误差。对那些误差较大的单木,在采用截取水平方向上距单木位置0.2m范围内的点云。该范围内点云的最高点和最低点高度差值被视作为单木高度。 H=max(z)-min(z) 利用该方法对那些误差较大的单木进行修正。 2.3 结果与分析 (1) 估测结果 得到表2中的结果。如下: 表2 10m样地内单木检测结果 多站扫描 单站扫描 实测 52 52 估测 48 49 非树木 8 15 真树木 40 34 识别正确率 83.33% 69.39% 未识别率 23.08% 34.62% 位置最大误差m 0.48 0.701 最小误差 0.04 0.052 平均误差 0.204 0.233 树高最大误差m 5.4 2.56 最小误差 0.04 0.01 平均误差 0.2 0.04 (2) 分析 结合上图和表发现,多站扫描时有12棵树、单站扫描有18棵树没有检测出来。通过图2可以看出,未检测出来的原因主要有两个:一是未检测出来的单木胸径都比较小,集中在5--11cm之间;另一个原因是由于该林区比较密集,彼此间的遮挡非常严重,阻碍了对小树的检测。 经过对点云数据和操作方法的分析,对误差来源总结以下几部分: (1) 全站仪本身测量问题 (2) Hough变换提取方法中矩阵大小和提取阈值设置大小引起的 (3) 在样地内树木比较密集,彼此之间的遮挡比较大,使得部分单木的树干点云不明显,在检测过程中不能检测出结果 (4) 该数据采集于8月份,正值林木枝叶最茂盛时期,密集的枝叶点云导致检测误差和错误率大大提升 (5) 提取的位置为可见树干表面的中心点,全站仪测量的位置为单木的边缘,二者之间存在距离的偏差 (6) 林区比较密集,彼此冠层顶部交叉很明显,某些比较高的单木的高层树枝或树叶点云导致了邻近单木的高估。 (7) 一些单木位于样地边缘,距离扫描中心较远,其次该林区单木比密集,彼此间遮挡严重,使得地基激光雷达并没有完全获取到这些单木的上层点云,导致低估。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的和基本思路: 该发明研究的目的是通过实践建立起一整套应用于密集林区的地基激光雷达数据采集、配准、过滤、单木位置和树高提取的方法体系;思路是首先对密集林区进行多站地基激光雷达扫描、在同一坐标系下数据配准、然后进行三步的数据过滤(目的是尽可能多的拿走噪点和非树干点)、采用图像处理的方法提取单木位置、最后在位置基础上进行单木树高的提取。 创新点: 1.脱离传统遥感手段,采用地基激光雷达来获取单木位置和树高。 2.国内外该技术在林区的应用基本上都是集中于稀疏或针叶林或落叶状态的林区,该发明研究主要是针对夏季枝叶茂密的白桦密集林区。 3.通过反复试验,采用了不同于国内外相似研究的林区点云数据过滤方法,数据的良好过滤对后面位置和树高的提取起到了至关重要的作用。 4.结合两种方法提取和修正单木树高。 技术关键和指标: 1.地基激光雷达扫描参数的设置、测站位置的设置。 2.数据配准时采用的坐标系要统一。 3.外业地基激光雷达扫描参数:水平向扫描角度范围0-360°,垂直向扫描角度范围是30--130°,水平和垂直向角度分辨率都为0.043°。
科学性、先进性
- 该发明研究脱离了传统遥感手段,而是采用目前国内外都在积极尝试的一种新方法,利用地基激光雷达来提取林区的参数。近年来地基激光雷达得到了快速地发展,正在成为无处不在的工具。在森林参数的定量测量应用上,利用地基激光雷达测量森林参数不仅节省了人力,还提高了工作效率,现在已经成为了快速获取树木几何参数的一种有效方法。 通过国内外近几年利用机载激光雷达对林区的研究表明,激光雷达技术在林业上的应用具有其它传统遥感手段所无法比拟的优势。对林区参数的获取更全面,精度也更高。在本研究中,就是采用了地基激光雷达来获取林区的3D点云数据,通过对获取点云数据的配准和过滤等操作,采用图像处理的方法从点云数据中提取密集林区的单木位置和树高。研究结果表明,采用地基激光雷达技术提取单木位置和树高得到了良好的结果,为未来地基激光雷达在林业上的全面应用提供了基础。
获奖情况及鉴定结果
- 1. 西南林业大学2010-2011学年科技创新基金资助项目,结题考核优秀 2. 荣获西南林业大学科技创新基金2010-2011学年度优秀项目成果“银奖”。
作品所处阶段
- 目前该作品还处于验证阶段
技术转让方式
- 无
作品可展示的形式
- 文字和图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 采用地基激光雷达技术获取林区的3D点云信息,利用点云信息提取单木位置和树高,它不仅节省了人力和物力,还提高了提取的精度,具有其它遥感方式所无法比拟的优势。通过对国内外该技术林业应用的分析和对该发明研究后期的结果验证,未来将会在更大的研究区域利用该技术提取各种森林参数。地基激光雷达对森林参数的高精度提取将会为星载与机载激光雷达在林业上的全面应用提供有力的验证,便于达到对那些人力无法到达或者具有其它原因而不能进入林区的森林参数的提取,达到激光雷达技术在林业上的全面应用,为未来在林业上的决策提供有力的依据,同时也大大降低了获取林业参数的成本。所以该技术未来在林业上的应用将会是非常乐观的。
同类课题研究水平概述
- 最早公开发表应用激光雷达进行森林参数测量的是前苏联,随后美国和加拿大的研究人员也注意到从森林返回的激光波形与从海洋探测中返回的激光波形很相近,从而发现了利用激光雷达估计森林属性和地形测量的可能性。自从2000年在阿姆斯特丹和2004年在伊斯坦布尔的ISPRS会议开始,TLS的研究活动就显著地增加。Simonse尝试使用二维Hough变换从点云中探测树干及胸高断面积。Aschoff将这种方法用于获取不同高度处树干的直径。Lauri Korhonen采用ALS、TLS和实际观测相结合的方法进行树冠覆盖研究和郁闭度提取等。Anne Bienert利用一棵树点云的最高点与地面模型之间的高度差异获取了树高。 在对原始点云数据的配准和分割方面,Henning和Radtke提出了一种在森林环境中对TLS数据配准的方法,使用来自自然表面的明确匹配连接点的估计,对森林场景进行多视角的距离范围影像配准。Bae 提出了一种对迭代最近点(ICP)的修改,使用随机抽样和几何图元,提出了一种发现对应点的方法。Bucksch采用骨架化算法,该算法的目的就是从点云中获取点集,然后描述它们之间的联系,便于提取数据的一个图形描述。 国内这方面的应用研究比较少见。近几年,中国科学院寒区旱区环境与工程研究所联合中国科学院遥感应用研究所、北京师范大学和中国林业科学研究院资源信息研究所对甘肃黑河流域大野口的超级样地进行了地基Lidar的林分结构三维扫描,进行了超级样地内的森林结构参数信息提取模型和方法研究(马明国等,2009) 倪文俭等(2010)根据研究中利用TLS提取的树干位置点云,截取从距地表最低点处1.28m到1.33m范围内的点构成厚度为5cm的点云层,通过对点云做圆回归,即可得到圆的位置和半径。黄华兵(2008)在用地基Lidar提取DTM后,通过树干点云的垂直分布连续特征来进行树干识别,最后结合圆拟合方法求得胸径。鲍云飞提出的单木识别算法的核心是找到包含树干点云的激光雷达点云范围,它主要考虑地基激光雷达扫描森林树木的特点,比较容易实现,而且省略生成DTM的步骤。