














基本信息
- 项目名称:
- 自适应电磁阻尼式高楼缓降器
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 通过交流永磁同步电机被动发电模式下的电磁转矩控制调节绞盘转速,运用电磁阻尼原理:当重物下降带动绞盘转动,通过减速器带动交流永磁同步电机的转子转动,产生感应电压,由计算可得重物下降的速度与电压成线性关系,利用纯硬件电路控制器来控制外电路IGBT开关的状态,以此来控制电机转子中的电流,达到控制电磁转矩的目的。从而实现自救逃生人员下降速度平稳、自适应控制。
- 详细介绍:
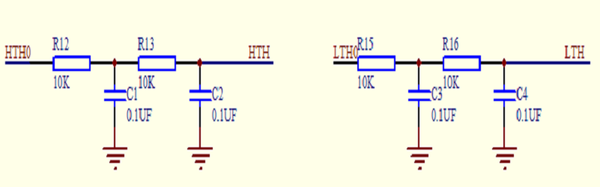
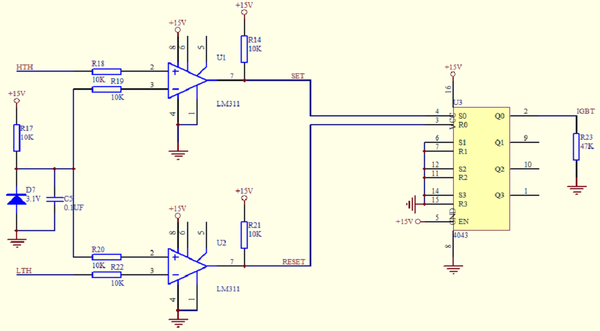
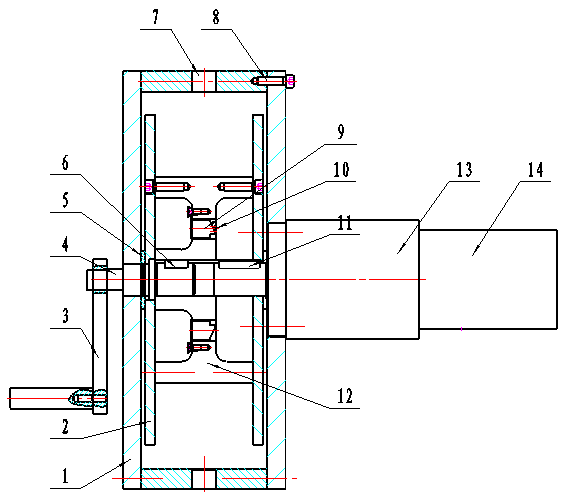
- 本设计为了便于在高楼逃生这种紧急状况下的紧急操作,提供了一种自适应电磁阻尼式高楼逃生缓降器,该缓降器由主轴及在其上安装的绞盘、减速器、交流永磁同步电机、控制器、救生绳、支撑架和手摇柄等构成。(如图1) 从(图2)可以清楚看到,交流永磁同步电机(14)直接与行星减速器(13)相连,减速器的轴通过标准键(11)与由45号钢制成的滚筒(12)联接,使其同步转动,主轴(4)一端与滚筒通过标准键(6)联接,另一端接出摇柄(3),便于回转绕线,重复使用。绞盘由两块绝缘材料制成的挡盘(2)通过螺栓和滚筒连接而成。外框架(1)由四块Q235A级钢制成的框板通过8个标准内六角螺钉(8)相接,其上下板中央均打有直径为24mm的孔(7),分别起到了安装固定装置的挂钩和引导绳索的作用。整个装置尺寸规格为406mm×155mm×320mm(不含摇柄、减速器、电机、挂钩),样品装置体积较小、结构紧凑,可靠性好。 介于行星减速器的传动比为1:70,外力较难将轴转动,为能在短时间内将绳绕回滚筒,在滚筒内设置了棘轮机构(如图3),其将往复运动转换成单向步进运动。棘轮轮齿采用单向齿,棘爪铰接于转盘上,摇柄顺时针方向摆动,驱动棘爪倾斜面接触棘轮齿不阻碍棘轮转动;摇杆逆时针方向摆动,棘爪侧面阻碍棘轮滑动,棘轮停止转动。这样不仅实现了多人救援、重复使用的功能,也减轻了装置的重量。 该缓降装置核心部位是交流永磁同步电机及其自适应速度控制器。根据交流永磁同步电机的转速与定子绕组感应电动势的线性关系设计了一种基于电压比较器的自适应速度系统电路,使用RS触发器结合2个电压比较器——速度上限比较器和速度下限比较器(如图2),采用迟滞比较原理,通过比较器电路输出的电平信号对RS触发器进行复位与置位,继而通过RS触发器的输出信号Q对IGBT开关进行触发控制,从而达到对下降速度的BANG-BANG控制。 实验测试结果 为了验证装置的性能,对所制作出的实物样机进行现场演示实验(见视频)。以下是实际试验得到的数据。 装置下降速度测试结果: 载荷(Kg)下降高度(m)下降时间(s)平均速度(m/s) 20 15.7 22.2 0.707 40 15.7 22.0 0.713 60 15.7 21.6 0.726 高楼逃生缓降器参数: 参 数 单位 数值 额定下降速度 m/s 0.72 最大承载重量 Kg 168 最小承载重量 Kg 20 控制系统工作电压 V 15 功率电阻 Ω 26 最大宽度 mm 320 最大高度 mm 406 使用最大高度 由绳长决定 重复使用 一台可救多人 安全绳 内芯ϕ4.2mm船空钢丝绳,外包双层编织麻线,破断负荷:>3.5KN,绳长:40m
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本新型高楼缓降器设计过程贯穿了三个主导思想: 第一、高楼逃生的过程本质上是人员势能释放的过程,采用电磁阻尼方式具有制动力调节平滑,无机械磨损,物理原理可靠的优点。 第二、采用纯硬件电路控制对电磁阻尼进行自适应调节,显著简化了高楼缓降装置的操作复杂性,便于多种人群紧急使用。 第三、发电制动过程中,利用逃生人员释放的势能对控制器进行供电,使其摆脱了对外部电源的依赖,更适用于各种突发性灾害等紧急场合的使用。 本设计应用现代设计理论和方法,将多种原理集合于该作品,理论知识充分转化为实际创作。其创新点可以归纳为以下三点: 机电一体化:将机械和微电子结合,采用纯硬件电路控制对电磁阻尼进行自适应调节,以实现预期的功能,显著简化了高楼缓降装置的结构复杂性与操作方式复杂程度,使作品更加智能化、自动化。 无需外部电源:发电制动过程中,利用逃生人员释放的势能对控制器进行供电,使其摆脱了对外部电源的依赖,更适用于各种突发性灾害等紧急场合的使用。采用电磁阻尼方式具有制动力调节平滑,无机械磨损,物理原理可靠的优点。 高可靠性设计:作品的机械结构设计与控制系统设计贯穿了安全设计理念,如纯硬件电路方式的BANG-BANG速度控制器、交流永磁同步电机、大扭矩行星减速机等的使用,减少了危急情况下由于逃生人员操作失误而导致二次事故的发生几率。使作品更具安全性和可靠性。
科学性、先进性
- 本新型逃生器将机械和微电子结合,利用Bang-Bang控制的方法来代替人去完成测试、判断和控制工作,以实现预期的功能,使作品更加智能化、自动化、人性化。减免了过多的人为操作,降低了处在危险中的逃生人员由于操作失误而造成的二次事故率。本高楼缓降器适用于各类建筑空中救险、逃生装备。尤其对于很多公共娱乐场所(商业楼、银行、医疗建筑、宾馆等)更具有安全保障作用,属于公共场所固定安装式逃生设备。
获奖情况及鉴定结果
- 2010年5月29日在宁波大学参加浙江省第七届大学生机械设计竞赛,获得三等奖。 2010年11月10日浙江师范大学第四届“挑战杯”课外学术作品竞赛一等奖。 2011年1月被立项为浙江省新苗人才课题项目。 2011年3月中国科学院合肥智能机械研究所孙丙宇研究员对该设计作品进行的评价。 2011年4月11日提出专利申报,申请专利号为:201120103128.2。
作品所处阶段
- (B)A.实验室阶段 B.中试阶段 C.生产阶段 D. (自填)
技术转让方式
- 按专利所附权利转让
作品可展示的形式
- √实物、产品 √模型 √图纸 √磁盘 √现场演示 √图片 √录像 √样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 推广应用价值: 本高楼缓降器适用于各类建筑空中救险、逃生装备(住宅楼、办公楼、写字楼、教学楼等)。尤其对于很多公共娱乐场所(商业楼、银行、医疗建筑、宾馆等),更具有安全保障作用,相较于其他市场上的高楼缓降器,不存在机械摩擦,能更高效、更安全地将需救人员送至地面,而且能实现较多人的重复使用而不会被损坏。相信各公共场所如果安装了该高楼缓降器,也就是为顾客提供了更有力的安全保障。并且该交流永磁同步电机及转速控制系统不仅能应用于高楼缓降机,也能应用于其他需要控制转速并且不能外接电源的场合。具有很广的应用前景。 使用说明: 使用时被救人员系好安全带,将带夹调整适度。拉动钢丝绳,使其处于绷紧状态。 被救人双手扶住逃离口处,请先将身体悬于室外,松开双手,开始先加速后匀速下降。在下降过程中,面朝墙,双手轻扶墙面,以免擦伤。该缓降器每次提供一人使用,(如有幼儿可由成人怀抱,使用该缓降器逃生)。当第一人下降后,第二人可以通过摇柄将钢丝绳卷上来,从而可以多次重复使用。
同类课题研究水平概述
- 目前市场上的缓降器形式较为单一,一般都是通过缓降绳索带动主机内的行星轮减速机构运转与磨擦轮毂内的磨擦块产生磨擦作用,从而产生阻力,使重物下降速度减慢。与此同时,人们也有运用摆线齿轮减速系统、液压阻尼系统、离心力原理、空气阻尼系统、速差式备用制动器等原理系统研制缓降器。尽管实现原理不同,缓降器的一般应用情况要求其将避难者降落速度控制在0.7~1m/s。 然而诸如行星轮减速机构、齿轮减速系统、速差式备用制动器等依赖机械阻尼的缓降装置多次重复使用时易出现疲劳强度减弱、零件磨损、塑性变形等问题,且由于其摩擦力的大小由离心块的离心力的大小和摩擦状况决定,很难保持匀速下降[11];而液压阻尼系统、空气阻尼系统都对设备精度要求十分之高,易受环境的影响。同时这类缓降装置都还存在着其它共性缺点,如对使用者的体能、操作技巧要求高,适用人群范围窄,难以适用老幼病残者;下降过程需要人工操作,且不能连续使用,下降速度不稳定,存在安全隐患。其主要针对普通家庭和个人使用,多户同时使用还有可能发生相互缠绕,以及安装问题、定期保养等原因,因此难以走进百姓家门。 当然也有人发明了运用电机的电磁转矩或电磁制动器进行制动的缓降装置。比如:陈品志[16]等人设计了一种基于直流发电机和电磁制动器的高楼逃生缓降器。其设计选用了直流电机和电磁制动器,运用单片机进行制动控制。但直流电机本身存在着一些缺点[17],如电刷和换向器易磨损,需经常维护,最高转速和使用环境也受限制;此外,直流电机结构复杂,制造困难,成本较高。同时单片机应用系统质量参差不齐,使用和维护也相对复杂、困难[2]。 综合分析以上逃生装置的优缺点,设计了一种基于电压比较器的自适应速度系统电路,采用纯硬件电路控制,省去了大量的编程,排除了死机的可能性,大大提高了缓降装置的可靠性。同时采用迟滞比较原理,减少了IGBT开关状态改变的频率,增加了开关的使用寿命。实现了自动化、智能化,提高了安全性能,扩大了适用范围,并且大大降低了生产成本。








