














基本信息
- 项目名称:
- 双足机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
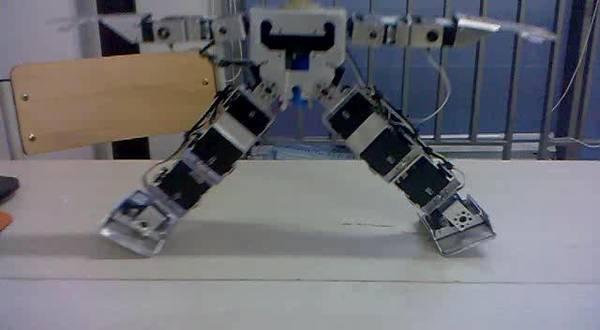
- 本机器人全部由本小组自行设计及组装而成。其中主控板由AVR单片机及FPGA模块组成,机械部分主要由铝合金板和舵机构成。目前机器人能实现的动作有鞠躬、抱拳、走路、做俯卧撑等十个动作。本机器人相对于目前市场上现有的机器人来说具有很多优势,重心更加稳定、关节更加灵活等等。
- 详细介绍:
- 一:实施内容 1、机械结构的实现: (1)由16路舵机控制机器人的各个关节。 (2)U型座的制作,稳固连接每一个舵机。 2、控制结构部分的实现: (1)控制板的制作,控制多路舵机,使得机器人能够运动起来。 (2)电源模块的制作和实现。 3、软件部分的实现: 利用C语言编程,设计出否和本机器人的一套很好的算法,使得机器人能够行走自如。 二:理论依据、技术指标: 1、...(查看更多)
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 双足机器人对机器人的驱动装置及机械结构提出了特殊要求,这将导致传统机械的重大变革双足机器人是工程上少有的高阶、非线性、非完整约束的多自由度系统,这对机器人的运学、动力学、控制理论的研究提出了一个非常理想的试验平台。在对其研究的过程中,很可能导致新理论、新方法的产生。本课题拟进行双足步行机器人的基本设计与研究工作研制具有高度稳定性的双足步行机器人平台,为研究后续工作和进一步的...(查看更多)
科学性、先进性
- 特色、技术优势: 1、足式运动系统在不平地面和松散地面上运动速度较高,而耗能较低(相对于轮式、履带式机器人而言) 2、双足机器人具有广阔的工作空间 3、双足机器人能在人类的生活和环境中与人类协同合作,而不需要对其进行专门大规模改造
获奖情况及鉴定结果
- 2010中国机器人大赛选拔赛亚军 哈尔滨工程大学第十七届五四杯一等奖
作品所处阶段
- 成品
技术转让方式
- 经本人同意
作品可展示的形式
- 实物、模型、现场演示、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 特色、技术优势: 1、足式运动系统在不平地面和松散地面上运动速度较高,而耗能较低(相对于轮式、履带式机器人而言) 2、双足机器人具有广阔的工作空间 3、双足机器人能在人类的生活和环境中与人类协同合作,而不需要对其进行专门大规模改造 应用前景: 1、 为残疾人(主要是下肢瘫患者)提供室内和户外行走工具。利用人工假腿、假椅或步行座椅尽可能使残疾人恢复正常行走功能(平地行走、坡地行...(查看更多)
同类课题研究水平概述
- 双足机器人是目前国内外研究领域的热点之一,其中科技水平比较领先是日本相关研究组织,国内对于双足机器人的研究刚刚起步,水平较低,尚有很大开发空间。其应用领域范围尚且较窄,主要是教师教学、学生学习控制系统和舵机相关知识的很好载体。但对其的掌握还不是很熟练,实现其相关的动作还比较困难








