














基本信息
- 项目名称:
- 实物激光内雕数据采集系统及处理软件
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
- 随着人们在生产生活中对三维面形数字化的迫切要求,各种实现三维面形输出的软件和硬件也在不断地开发与完善之中。本作品的主要任务就是采用自主研发的高速三维扫描系统完成动态实物的扫描,并且实现三维面形的重构,最后得到实物内雕输出。本作品采用了两种方法:Crust算法和Ball-Pivoting算法实现三维面形的重构。
- 详细介绍:
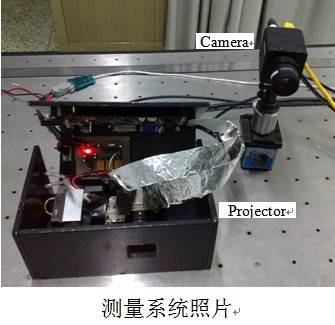
- 目前,激光三维内雕技术已相当成熟并形成了相当规模的产业,如我省的浦江水晶内雕产业。但基本上所有的内雕工艺品都是以三维建模数据来实现内雕的,动态真实物体比如人像的内雕目前国内还比较少见。研究动态真实物体水晶内雕数据采集及处理技术将促进水晶内雕技术的进一步推广应用。 发明目的 1.实现动态实物三维数据及纹理的快速高密度获取。 2.实现散乱实物点云的面片重构。 3.实物水晶內雕三维显示。 基本思路 作品以动态实物数据的快速采集为首要目标,利用正弦光栅投影高速三维数字化仪得到实物三维面形的点云数据,通过自主开发软件实现实物的三维重构,从而将真实的物体内雕于水晶中。这一目标的实现具体可以分为几个步骤: 1.利用高速、高分辨率三维测量系统进行动态实物三维数据采集。 2.将所得点云进行三维表面重构与三角面片输出。 3.进行水晶内雕与其三维场景表现的研究与改进。 技术关键 1.动态实物高速三维测量的实现。 2.散乱点云的表面重构与建模。 主要技术指标 一、高速、高分辨率三维测量系统主要技术指标: 1.在1/60秒的时间内完成对实物点云的采集。 2.一次扫描可获得640×480点的3D像素。 3.系统的测量体积为200mm×300mm×150mm。 4.X和Y轴的空间分辨率是0.2mm,Z轴的空间分辨率是0.15mm。 二、散乱点云重构软件的主要技术指标: 1.程序安装包10.4M。 2.在3min内重构10,000点云。 3.最大可处理2,000,000点云。 主要创新点 1.提出相移正弦条纹加三灰度级空间编码图案的方法进行高速、高分辨率物体三维形貌和纹理测量。 2.根据DLP投影仪特点,对其进行改装,实现高速投影。搭建了高速测量系统。 3.利用Boll-Pivoting算法和Crust算法实现散乱点云的三维表面重构。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 市场上基本上所有的内雕工艺品都是以三维建模数据来实现内雕的,动态真实物体比如人像的内雕目前国内还比较少见。研究动态真实物体水晶内雕数据采集及处理技术将促进水晶内雕技术的进一步推广应用。 发明目的 1.实现动态实物三维数据及纹理的快速高密度获取。 2.实现散乱实物点云的面片重构。 3.实物水晶內雕三维显示。 基本思路 1.利用高速、高分辨率三维测量系统进行动态实物三维数据采集。 2.将所得点云进行三维表面重构与三角面片输出。 3.进行水晶内雕与其三维场景表现的研究与改进。 技术关键 1.动态实物高速三维测量的实现。 2.散乱点云的表面重构与建模。 主要技术指标 一、高速、高分辨率三维测量系统主要技术指标: 1.在1/60秒的时间内完成对实物点云的采集。 2.一次扫描可获得640×480点的3D像素。 3.系统的测量体积为200mm×300mm×150mm。 4.X和Y轴的空间分辨率是0.2mm,Z轴的空间分辨率是0.15mm。 二、散乱点云重构软件的主要技术指标: 1.程序安装包10.4M。 2.在3min内重构10,000点云。 3.最大可处理2,000,000点云。 主要创新点 1.提出相移正弦条纹加三灰度级空间编码图案的方法进行高速、高分辨率物体三维形貌和纹理测量。 2.根据DLP投影仪特点,对其进行改装,实现高速投影。搭建了高速测量系统。 3.利用Boll-Pivoting算法和Crust算法实现散乱点云的三维表面重构。
科学性、先进性
- 本作品的目的是实现动态实物的三维内雕输出。目前,国际上日、美、德、加拿大等国已经推出不少商业化的测量漫反射静态物体三维面形的光栅投影测量系统[1]。 本作品的创新点就在于实现高速三维数据的采集。实现高速测量主要有两类方法。一类是投影一幅正弦条纹,采用傅立叶变换法[5,6]、小波变换法或其它分析方法求解变形条纹的相位。这方面研究的较新进展是Su[7]提出的将二值编码、正弦光栅和颜色结合到一幅图案中,采用傅立叶变换求解正弦条纹相位,并利用颜色和二值编码确定条纹级次,实现动态绝对相位测量。另一类方法是投影多幅正弦条纹,采用相移法求解变形条纹相位。这方面的研究主要有:Huang[8]等提出的用颜色将三幅有相移的正弦光栅编码到一幅彩色图案中,利用相移法求解相位;陈[9]等提出的用颜色编码两幅相移的正弦光栅,利用傅立叶变换法求解相位(相移FTP)。
获奖情况及鉴定结果
- 作品荣获浙江师范大学第四届“挑战杯”大学生课外科技作品竞赛一等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 技术购买
作品可展示的形式
- 实物、产品 现场演示 图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 实物、产品 现场演示 图片
同类课题研究水平概述
- 国际上日、美、德、加拿大等国已经推出不少商业化的测量漫反射静态物体三维面形的光栅投影测量系统[1]。目前国际上实验室中研究较多的是高分辨率、实时三维测量方法[2,3]。国内清华大学、四川大学、天津大学、浙江大学等也做了比较深入的研究[4]。但商业化的测量与转化技术少见报道。 光学三维面形数字化仪的应用领域正在扩大,它将在工业环境中的尺寸和形位参数的检测[5];虚拟现实[6]、影视特技[7]中的三维姿态检测、三维数据输入;医学整形和美容[8-12];逆向工程[13,14];工业产品的外观设计及质量控制[15,16];文物保护;网络营销等领域得到广泛应用。 在三维数据处理方面,由美国开发的同类软件Geomagic Studio已经可以完成数据的处理;由英国的DELCAM公司出品的专用三坐标测量软件PowerINSPECT,输出的数据可以为绝大部分通用的CAD/CAM软件所接受。这些国外的软件价格偏高、专业性强等特点。此外,其软件配套的仪器也需要对应购置,价格高,售后服务也不能较好跟进。因此国内许多小型萌芽企业暂无使用现有的国外技术能力。自主研发相应仪器的配套软件,将大大降低成本,更好地开拓内地市场,提升核心竞争力,也适合浙江中小型企业的发展要求。 本项目在成功获取三维点云数据的基础上,实现测量数据输出为工程数据文件。架起了连接直接测量的三维点云数据与工业输出处理数据之间的关键桥梁,为国内自主研发相关技术软件做出贡献。







