














基本信息
- 项目名称:
- 智能按摩机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品能够按照身体穴位对身体多个部位进行揉和捏,实现对中医按摩手法的模拟,且揉和捏的手法和力度都可以自由按需调节,从而实现自助智能摩。本作品采用一种全新的按摩方式模仿人手对人体进行按摩,不同于常见的按摩器械,是一种智能化的按摩机器人,本作品由以AT89C51单片机作为控制系统,配合使用ULN2003,L298N,继电器等实现机械手的空间四自由度定位,完成按摩手法的模拟。
- 详细介绍:
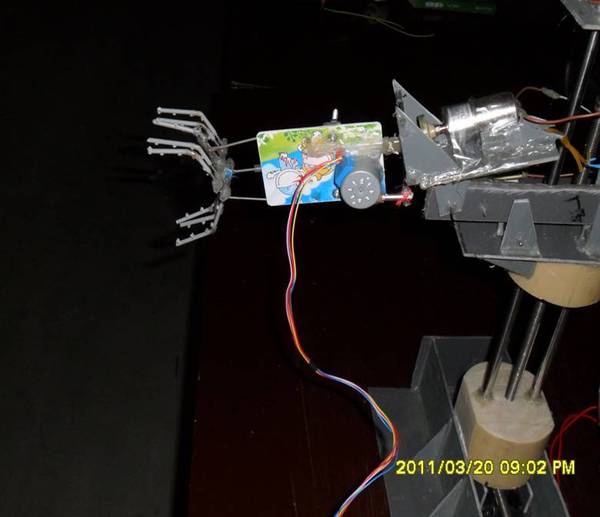
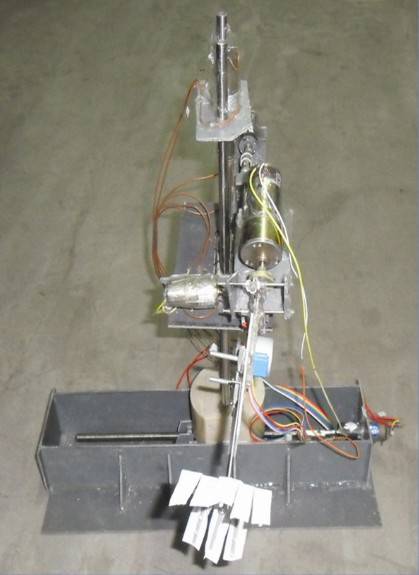
- 本作品能够按照身体穴位对身体多个部位进行揉和捏,实现对中医按摩手法的模拟,且揉和捏的手法和力度都可以自由按需调节,从而实现自助智能按摩。本作品采用一种全新的按摩方式模仿人手对人体进行按摩,不同于常见的按摩器械,是一种智能化的按摩机器人,本产品以电能作为动力来源,可以省去人力,节省时间。本作品由机械主架,机械臂和机械手三部分组成,以AT89C51单片机作为控制系统,配合使用UL...(查看更多)
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 发明的目的和基本思路:随着老龄化步伐的加快,中老年人的健康、照顾对大家提出了严重的考验。中医按摩在日常保健、医疗中起到了举足轻重的作用,至今为止,中医按摩只是由有经验的按摩师人工进行。近些年,虽然市场上出现了很多按摩器械,在一定程度上丰富、扩大了按摩保健治疗的范畴,但是由于机械力度难以掌握,振动频率不易控制,大多按摩器械还不能达到高水平按摩师的效果。鉴于此,我们设计了一款可...(查看更多)
科学性、先进性
- 作品的科学性先进性:本作品采用单片机作为控制系统实现按摩机器人的控制,而现在市面上的按摩设备多采用了复杂的电路从而增加了产品的成本,为了解决成本过高的问题也为了满足大众的消费需求,因此本作品采用了单片机作为控制系统。 利用单片机来控制机械手的升降,前后,左右的移动,机械手的转动采用步进电机,通过单片机程序从而精确的控制了转动的角度和揉的初始位置。 本作品全部基础部分采用钣金...(查看更多)
获奖情况及鉴定结果
- 2011年5月5日在山东建筑大学由共青团山东建筑大学委员会举办的第十二届“挑战杯”学生课外学术科技作品竞赛中荣获一等奖
作品所处阶段
- 中试阶段
技术转让方式
- 普通专利权转让
作品可展示的形式
- □实物、产品 ■模型 ■图纸 □磁盘 ■现场演示 ■图片 ■录像 ■样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:本作品为以单片机为控制系统,利用按键扫描进行开关控制,使用时通过人工控制按键开关,实现机器人前后、左右、上下、柔和捏以及机械手角度摆动的控制,从而实现了对人体的智能按摩。 该作品的适用范围:所有需要按摩的广大人群均可使用。 技术特点和优势以及推广前景的技术性说明:本作品以单片机作为控制系统,配合使用2003芯片,L298N,继电器,步进电机,易于实现,...(查看更多)
同类课题研究水平概述
- 现如今,无论是国内还是国外,在按摩这一方面的器械并不多样化,大多是单功能或是多功能按摩椅。中国医疗器械的发展速度令世界都为之瞩目。有一种说法是“谁能占据中国的医疗器械市场,谁就能赢得未来”。无论从市场还是从企业本身来看,中国的医疗器械产业都具有巨大的投资回报潜力。 通过国内外的分析我们得到一个启示,在机器人方面有一个广阔的市场,而在按摩行业这更是一个更加广阔的天地,因此按摩...(查看更多)








