














基本信息
- 项目名称:
- 自动寻迹小车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 该技术可以应用于无人驾驶机动车,无人工厂、仓库、服务机器人等领域。 自动寻迹是基于自动导引小车(AGV—auto-guided vehicle)机器人系统,用以实现小车自动识别路线,以及选择正确的路线。机器人系统由感知、决策和执行三个子系统组成,感知系统负责获取机器人内部状态和外部环境信息,决策系统根据工作任务和感知信息进行任务规划,执行系统根据任务规划控制机器人关节实现操作作业。
- 详细介绍:
- 1本设计中采用黑地白线作为引导线,使用反射式红外传感器感知导引线。基于可靠的硬件设计和抗干扰的双电源供电方案,加之采用稳定的软件算法,实现了对小车在进行过程中路线的良好控制。该技术可以应用于无人驾驶机动车,无人工厂、仓库、服务机器人等领域。 2寻迹小车制作的内容与目标 我们制作的简单寻迹车可以划分为主控制板系统、传感器系统、小车车载系统三部分。主控制系统由主控CPU电路、传感器接...(查看更多)
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 自动寻迹是基于自动导引小车(AGV—auto-guided vehicle)机器人系统,用以实现小车自动识别路线,以及选择正确的路线。机器人系统由感知、决策和执行三个子系统组成,感知系统负责获取机器人内部状态和外部环境信息,决策系统根据工作任务和感知信息进行任务规划,执行系统根据任务规划控制机器人关节实现操作作业。 本设计中采用黑地白线作为引导线,使用反射式红外传感器感知导引线。...(查看更多)
科学性、先进性
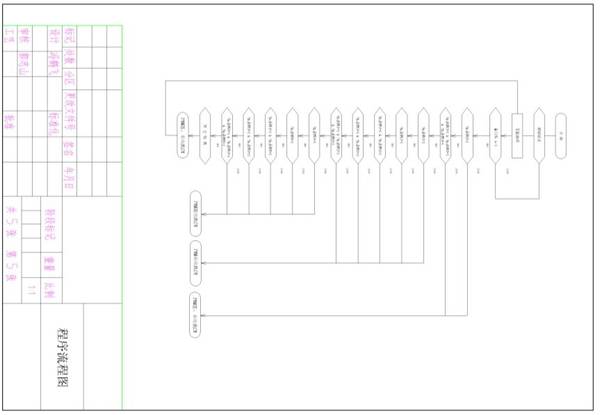
- 本设计小车在硬件上使用红外线传感器提高了抗干扰性,采用PWM技术解决了电动机的效率问题。软件上充分利用了AT89C52单片机的优点,使用优化算法,克服干扰,实现了车速控制,自动寻迹。从最后的测试结果来看,本系统能够很好地完成设计任务。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段。
技术转让方式
- 非专利技术转让。
作品可展示的形式
- 现场展示,录像,样品。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
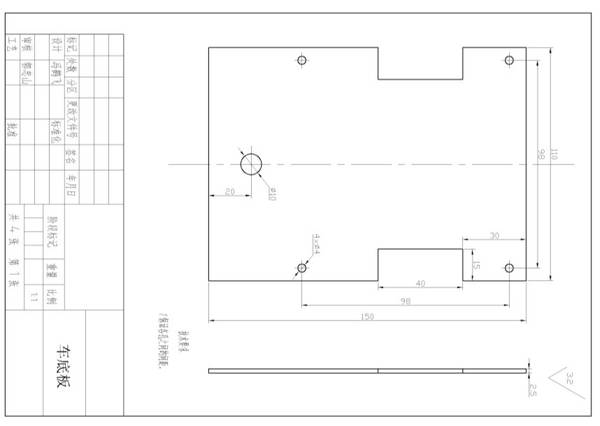
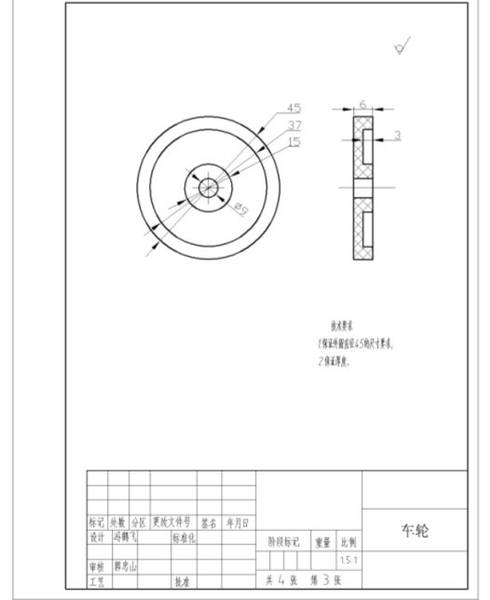
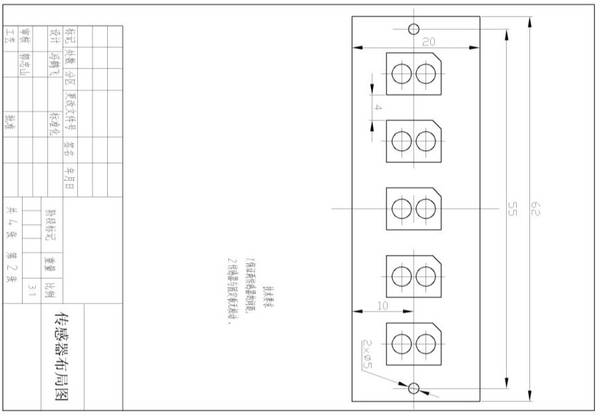
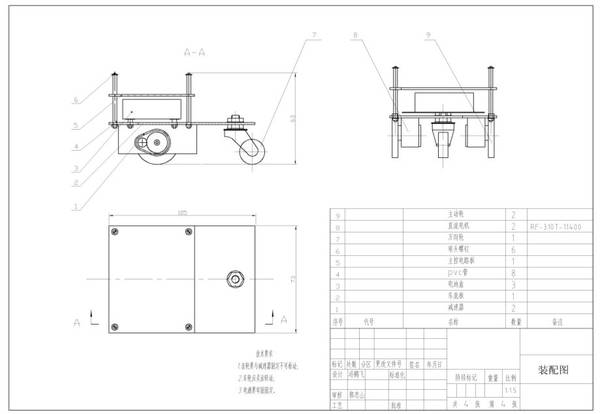
- 本设计的寻迹小车由主控制板系统、路面传感器检测系统及车身载体系统三部分组成。 主控制系统由主控CPU电路、传感器接口电路、直流电机驱动电路、串口通讯电路、稳压电路、时钟电路、复位电路及电源和电机指示电路等八个部分组成。传感器检测系统模块经导线直接与AT89C52单片机P1口相连。车身载体系统由车底板、直流电机车轮、万向轮及减速器等组成。 本设计中采用黑地白线作为引导线,使用反射式...(查看更多)
同类课题研究水平概述
- 智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。智能车辆在原有车辆系统的基础上增加了一些智能化技术设备: (1)计算机处理系统,主要完成对来自摄像机所获取的...(查看更多)








