














基本信息
- 项目名称:
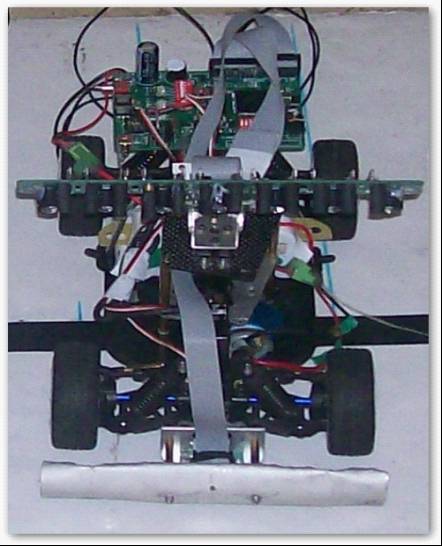
- 激光循迹车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 激光循迹车基于二维激光传感方案采集路面信息,经由单片机分析处理,控制车体按既定路线快速稳定行驶,稳定运行速度可达2.7m/s~3m/s,与之前的红外传感器相比,探测距离更远;采用双舵机方案,较之前单舵机方案,检测范围更宽;软件对赛型识别及控制策略进行了彻底的更新。机械架构,更加小巧,精致。适用于货物储藏仓库中的货物运送等场合。
- 详细介绍:
- 激光循迹车车是具有自主识别能力的车,会根据道路情况,作出判断,选择最佳行车路线。它能在固定的,宽50cm的白板,中间有黑线的轨道上运行,基于激光传感器采集路面情况,经由单片机分析处理,控制车体按既定路线快速稳定行驶,适用于货物储藏仓库中的货物运送。 相对之前的设计,我们在传感器、机械安装上面有了改进。从之前的红外传感器改为激光传感器,检测距离更远,信息处理得更快;传感器有专门的舵机控制,可以调整传感器角度,控制激光照射距离。能保持在2.7m/s~3m/s的速度稳定运行。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:在大型货物储藏室中,方便快捷的运送货物到达指定地点。不需要人为的操作,小车在固定的轨道上,利用激光传感器,甄别道路障碍,自由行驶。 基本思路:由激光传感器检测路面情况,并把信号传给单片机,单片机控制小车的行驶路线及小车的速度。 创新点:由激光传感器替换原来的红外传感器,检测更远,信号处理的更快;激光传感器可用舵机控制,调整激光照射地面角度。 技术关键:(软件)路径识别与控制策略;(电路)激光传感器检测距离及抗干扰性;(机械)激光传感器的安装精度 技术指标:速度2.7m/s~3m/s,稳定运行不出赛道。
科学性、先进性
- 该作品采用激光传感器,与之前的红外传感器相比,探测距离更远;采用双舵机方案,较之前单舵机方案,检测范围更宽;软件对赛型识别及控制策略进行了彻底的更新。机械架构,更加小巧,精致。具体技术说明见报告
获奖情况及鉴定结果
- 2010年7月在湖南大学举办的华南赛区第五届“飞思卡尔”杯全国大学生智能车竞赛,获得华南赛区光电组一等奖。 2010年8月在杭州电子科技大学举办全国总决赛,获得全国光电组二等奖。
作品所处阶段
- 中试阶段,可以直接在飞思卡尔规定赛道上运行
技术转让方式
- 无
作品可展示的形式
- 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:打开电源开关及电机开关后,车即可跑,还可通过拨码开关调节车的速度。 技术特点:能够沿着规定的轨道快速稳定运行。 该作品所用到技术可以运用在仓库或货物中转站自动完成搬运工作。这样可以节省大量人力成本,并能长时间,满负荷工作。
同类课题研究水平概述
- 无








