














基本信息
- 项目名称:
- 足球机器人的研制
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 我制作的是一个能在专用的比赛场地上进行比赛的足球机器人。它可以在一定范围内发现任意角度上的红外足球,并记方向,之后自主追球。接触到球后,它能带球进攻,冲击对方球门。当对方的机器人前来抢球时,双方会争球,此时可能会出边界,所以我给它增加了自主规避边界的功能。而且争球的时容易出现僵持不下的情况,对此,我给它开发了以一定的角度拨球的功能,这样能够有效地摆脱对方防守机器人的纠缠,提高进攻效率。
- 详细介绍:
- 我的科研项目是足球机器人。它能在专用的比赛场地上进行足球比赛。 足球比赛有一个特定场地(用不同的颜色分成了6个区域可用灰度检测传感器检测)和一个专用球(球形内含一个红外线发射管),比赛选手每方两个机器人,一般为一个进攻机器人和一个防守机器人。也可以用两个进攻机器人或两个防守机器人。 所以要求进攻机器人可以实现在一定范围内发现任意角度上的红外足球(用红外复眼传感器检测球发出的红外光波),并记录球的方向,之后自主追球。当接触到球后,它就会带球进攻,冲击对方球门。此时一般会有对方的机器人前来抢球,然后双方机器人进行球的争夺。抢球时可能会把双方逼出边界,所以我给机器人增加了自主规避边界的功能(主要靠红外测距传感器实现)以防犯规。同时,在争抢球的过程中容易出现僵持不下的情况,对这一问题,我给机器人开发了以一定的角度拨球的功能(主要用到了指南针传感器把场地按角度划分),这样能够有效地摆脱对方防守机器人的纠缠,提高进攻效率。 防守机器人同样要求能够发现球并追球。但它的主要职责是防守(发现球后立刻把球扑出禁区)所以,我对它的程序上的设定是当球出了禁区后不再继续追球,而是马上回到球门正中心防守以应对对方下次的进攻。
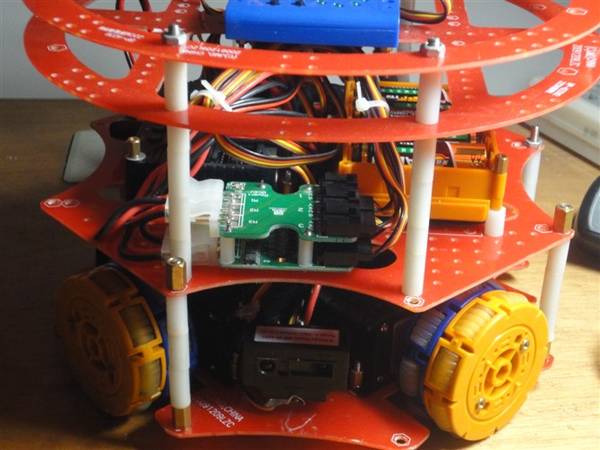
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:随着计算机、微电子、信息处理及智能控制的快速发展,机器人技术也在逐步深入和细化。移动机器人作为机器人技术的重要领域,正越来越多地受到人们的关注,朝着智能化和多样化的方向发展。而我们作为学生秉着学以致用的原则选择了与时代和生活紧密相关的自主移动机器人作为研究方向。赛场是检验成果的最佳地点,所以我确立的作品为足球机器人。 基本思路:通过各种传感器的综合应用,把周围的环境信息传出给RCU,再用事先编写的程序进行处理,最后把处理后的信息输出给各个部件,完成比赛。 创新点:1出于节能考虑,在其后下方加入了一个红外测距传感器,使之能准确定位于己方球门立柱上以获得支撑,减小电机输出 2采用左右后三处安装灰度传感器的模式,定位时取平均数计算以减小误差提高精确度 3采用了 一个升压器和大功率驱动卡使其在同等条件下增强了功率 4采用了万向轮使其能够直接向任意方向行驶,提高了反应速度和机动性能。 技术关键:底盘结构的设计、运动学原理的运用、传感技术的综合运用、单片机的运用、基于C语言的程序设计。 主要技术指标:4组全向轮的配合使用、运动的合成与分解、红外复眼、红外测距、灰度检测、电子指南针等传感器的综合运用和用C语言编写比赛程序等。
科学性、先进性
- 该足球机器人特点有:1出于节能考虑,在其后下方加入了一个红外测距传感器,使之能准确定位于己方球门立柱上以获得支撑,减小电机输出 2 采用左右后三处安装灰度传感器的模式,定位时取平均数计算以减小误差提高精确度 3 采用了一个升压器和大功率驱动卡使其在同等条件下增强了功率 4 采用了万向轮使其能够直接向任意方向行驶,提高了反应速度和机动性能。并简化了它的运动学控制 。比起一般的足球机器人,它能够更加快速的追球,并能更大范围的发现球,进攻角度也有所增加,具有拨球的功能,进一步强化了乌龙球的防止,使其在赛场上更具效率。
获奖情况及鉴定结果
- 获2011年中国地质大学江城学院第二届“创新杯”课余科研立项校一等奖。
作品所处阶段
- 模型已经完成,在进行进一步的功能优化。
技术转让方式
- 无
作品可展示的形式
- 视频和模型
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该作品由程序直接控制无需遥控,所以操作十分简便, 只需将其放在比赛指定场地,然后打开开关,再进行指南针校准即可等待命令开始比赛。它的优势是,移动简洁、灵活,追球时反映速度快,寻找球时探测范围广,可攻守两用,边界规避能力强,较少发生乌龙球,并且节能耐用。它主用于足球机器人比赛。亦可进军高科技玩具市场,或作为机器人教学研究使用。目前这些都是新兴项目,有较大的市场,和乐观的前景。
同类课题研究水平概述
- 现在的足球机器人比赛还远没有达到我们想要达到的地步,现在的比赛完全是一种仿真式的比赛,现在的足球机器人比赛的场地按国际的规定为1.5米×1.3米场地。场地上有中线,有门区,这与我们的实际的比赛没有什么太大的区别。每个足球机器人的车体按国际的规定不超过7.5cm×7.5cm×7.5cm.,(微型机器人比赛)机器人小车负责把红色的高尔夫小球撞进球门。在赛场的上方有一个摄像头,摄像头把得到的信息上传到计算机中。经计算机的特定程序处理,得到场上双方的态势,再经过决策系统的处理,输出相应的数据。经通讯系统发送与接收,控制机器人小车在场上奔跑。 机器人的大脑在哪里?机器人的大脑就是装在一台计算机主机中的决策系统。决策系统根据现场的敌我双方的比赛态势,决定我方机器人处于进攻还是防守。然后决定机器人的队形和机器人离足球的远近决定是主攻还是助攻、主防还是助防。根据每个机器人的任务决定相应的动作。 相应的足球机器人有自己的眼睛--视觉系统。足球机器人的视觉系统把比赛场地的敌我双方的态势都反映到计算机中,然后用计算机图像软件进行处理。利用模式识别技术,对数字图像进行特征提取等操作,形成自己的计算机内数据的表达,即敌我双方机器人的位置和角度。 现在的足球机器人还没有长自己的嘴巴—但是他们却有一个统一的嘴巴。由上位机统一发出命令,该命令由机器人车体的通讯系统接收,所以能实现机器人小车的互相协调。 关于足球机器人的双腿:足球机器人的双腿就是机器人的左右轮。就是车体部分,它包括车轮、电机、车架、通讯模块等部分。由通讯模块接收上位机传来的命令,来驱动左右轮的速度,从而实现达到控制的目地。








