














基本信息
- 项目名称:
- 仿生行走机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本文通过对自然界动物行走步态的研究,探索一种适合多足机器人行走的步态规划方案,并实际制作成功一个机器人样本。
- 详细介绍:
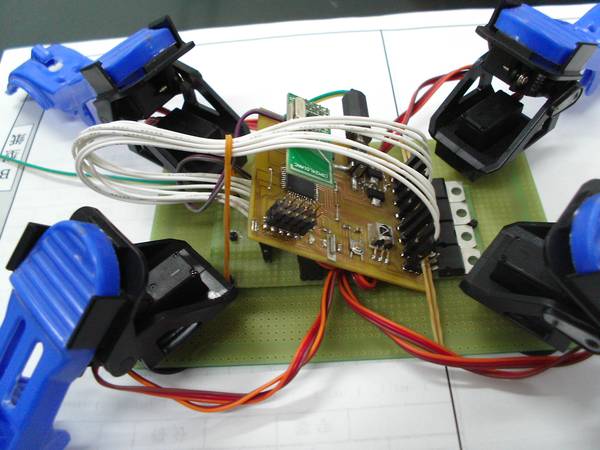
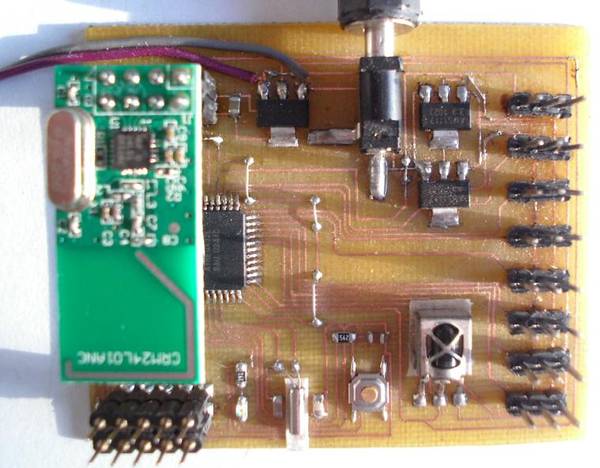
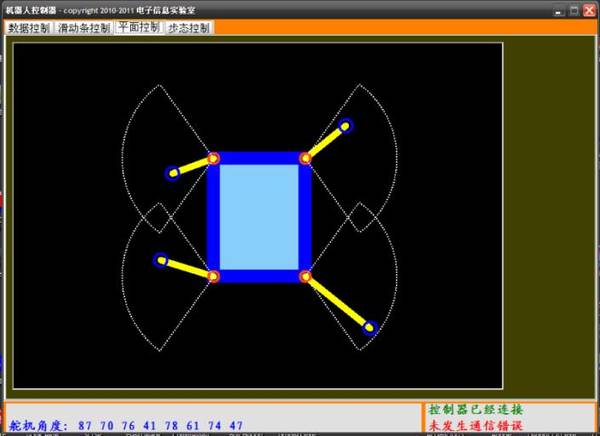
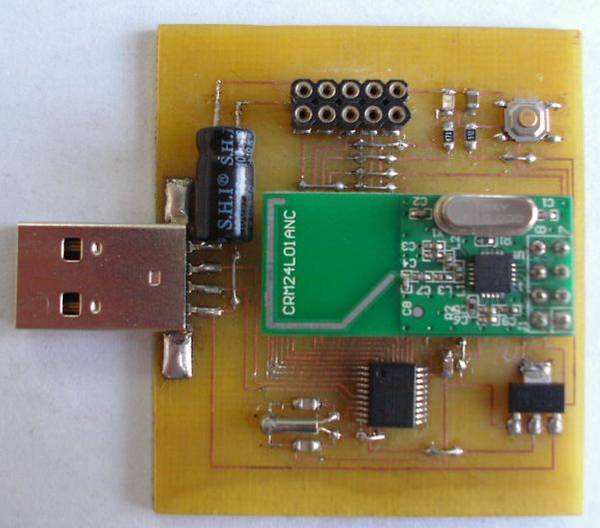
- 本文通过对自然界动物行走步态的研究,探索一种适合多足机器人行走的步态规划方案,并实际制作成功一个机器人样本。其样本机器人具有如下功能:模仿四足动物的行走方式,达到行走流畅、控制迅速;机器人通过机载电池供电,使其运动独立,不受限制;机器人具有前进、后退、左转、右转等基本行动功能; 机器人携带无线装置,可以用笔记本电脑对机器人进行远程控制。通过远程控制电脑上的控制软件,操作者可以通过在控制软件的界面上点击按钮、滑动控件等方式对机器人进行控制,所有的控制命令都通过USB转换器转换为无线电信号发送到机器人接收器上,进而完成指定动作。通过对猫科动物较为细致的仿生学研究,我们提出了一种合理的步态规划方案,经过实际测试,效果较好。另外本机器人的编程语言采用一种自主设计的计算机语言(uC),这种语言仿照C语言的语法格式,并对C语言中容易引起潜在错误的地方进行了改动,如增加循环移位、设置合理的运算优先级等。我们使用C#自主设计了一个编译器对这种语言进行编译开发,取得了较好的效果。
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本设计根据仿生学的相关研究,探索出四足动物的行走规律,再基于RISC高速处理器控制机器人关节进行相应的运动,驱动四足机器人进行类似真实动物的行走效果. 以往的传统行走机器人只能进行机械的运动,本设计的创新在于机器人的智能控制,在机器人脚部、关节等装有角度传感器、压力传感器,通过软件控制使机器人能自动在复杂的地形中维持平衡和行走等。
科学性、先进性
- 本作品在设计中突破了以往机器人只能机械运动,而没有智能感知这一技术瓶颈。通过分布在机器人各个关节、足部的大量传感器,使机器人能实时获取周围环境的相关信息,并及时做出反应,在复杂地形中也可以平稳行走。这个技术特点使它可以在远距离运输、现场搜救、探险等众多领域获得应用。 本作品中的软件控制部分为模块化、通用化设计,这样只需改动很少代码,就能使机器人应用于其他领域,大大增强了它的通用性,减少了系统开发成本,具有较大的市场推广价值。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物、产品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 此作品在长途运输、机器人救灾等不适合人类行走的地方具有较好的适应性,能显著减少人力成本。
同类课题研究水平概述
- 行走机器人出现于20世纪70年代,其应用领域大致可以分为两类。第一类源自工业机器人界,在这里所有活动都按固定的程序进行,其主要局限性在于成本太高、能耗过大且灵活度不够高。现在的机器人已经克服了这一缺点,其中代表机器人最先进水平的行走机器人研究在日本和美国等发达国家开展地较早,到现在已经形成完整的产业化。例如美国波士顿公司的“大狗”机器人,身长1米,拥有四条高度灵活的通过液压系统驱动的机械腿,能在很复杂的地形中自如地行走,目前这种机器人已经产品化,甚至被派到伊拉克战场执行特殊任务。 在双足行走机器人领域,日本也达到了世界领先水平。由日本本田公司研制的仿人机器人ASIMO,是目前最先进的仿人行走机器人。ASIMO身高1.3米,体重54公斤。它的行走速度是0-6km/h。早期的机器人如果直线行走时突然转向,必须先停下来,看起来比较笨拙。而ASIMO就灵活得多,它可以实时预测下一个动作并提前改变重心,因此可以行走自如,进行诸如“8”字形行走、下台阶、弯腰等各项“复杂”动作。此外,ASIMO还可以握手、挥手,甚至可以随着音乐翩翩起舞。 我国四足移动机器人的研究从80年代开始,也取得了一系列的成果,积累了一定的研究经验,研制成功一批四足机器人样机。 吉林工业大学从2O世纪7O年代开始,由陈秉聪教授和庄继德教授分别带领的两个研究小组,开始进行非常规行走机构的研究。1985年,陆怀民博士研制出一台具有两条平行四边形腿的步行机耕船试验台车,在土槽试验中表现出较高的牵引效率,主要用于无硬底层的水田耕作。 1991年,上海交通大学马培荪等研制出JTUWM 系列四足步行机器人。JTUMM—III,以马为仿生对象,每条腿有3个自由度,由直流伺服电机分别驱动各个关节的运动。该机器人采用两级分布式控制系统,脚底装有PVDF测力传感器,利用人工神经网络和模糊算法相结合,采用力和位置混合控制,实现了四足步行机器人JTUMM—III的慢速动态行走,极限步速为1.7 km/h 。为了提高步行速度,将弹性步行机构应用于该四足步行机器人,产生缓冲和储能效果。 另外,1989年,北京航空航天大学在张启先教授的指导下 ,孙汉旭博士进行了刚性足步行机的研究,试制成功了一台四足步行机,并进行了步行实验。








