














基本信息
- 项目名称:
- 基于力反馈的虚拟手术的设计与研究
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 近年来,医疗事故愈发频繁,医患矛盾成愈演愈烈之势。据调查,半数以上的医疗手术事故,尤其是外科手术事故,都与手术医生的操作失误有关,因此,对于手术医生的培养与训练越来越受到重视。传统的手术训练,在经验丰富的医生演示后,实习医生往往通过基于人造模型、尸体、动物或病人等对象进行练习。人造模型与尸体真实感不一致,尸体资源有限且昂贵,动物活体组织及结构与人体差异较大,基于病人的练习还涉及法律和道德等问题。
- 详细介绍:
- 近年来,医疗事故愈发频繁,医患矛盾成愈演愈烈之势。据调查,半数以上的医疗手术事故,尤其是外科手术事故,都与手术医生的操作失误有关,因此,对于手术医生的培养与训练越来越受到重视。传统的手术训练,在经验丰富的医生演示后,实习医生往往通过基于人造模型、尸体、动物或病人等对象进行练习。人造模型与尸体真实感不一致,尸体资源有限且昂贵,动物活体组织及结构与人体差异较大,基于病人的练习还涉及法律和道德等问题。 虚拟手术仿真系统不仅有助于解决上述问题,并可使实习医生对不同的手术过程反复训练,还可以让医生对不经常做的复杂手术重复练习以保持其手术水平,还有助于临床医生对将要做的手术进行规划、模拟,以便制定合理的手术方案。 本作品的研究作眼于目前国内虚拟手术系统的旺盛需求和相对落后的技术体系,努力开发出一整套具有力反馈的虚拟手术系统,包括硬件系统和软件系统,预计在力反馈器设计、通用接口、虚拟物理器官模型的构建以及虚拟力的解算等方面提出一些创新思维,提高我国该领域的技术水平,使我国早日具有自主知识产权的整套虚拟手术系统的研发和设计能力。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
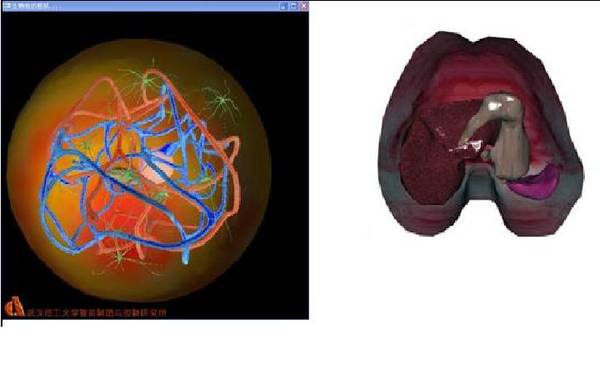
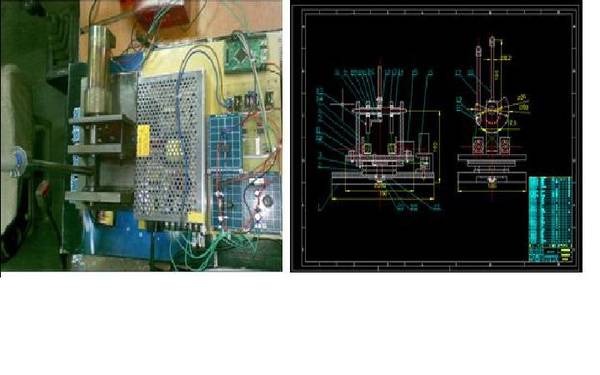
- 1.基本思路 本作品主体包括硬件和软件两大部分。其中,硬件部分包括力反馈机械装置、传感器以及下位机的控制电路,软件部分包括上位机软件(通信调试界面、力觉解算及显示模块)和基于图像引擎的三维虚拟手术模块。 2.创新点 (1)创新设计一款新型高灵敏度、大位移角的多自由度力反馈器械; (2)开发一套结合力反馈器的虚拟手术通用软件平台系统。 (3)利用质点-弹簧模型模拟软组织在受外力时的形变特征,使用虚拟体弹簧和准静态方法优化算法,尽量达到变形的真实性与实时性 3.技术关键 1) 多学科集成的机械系统设计技术 设计过程涉及机械设计、医学、计算机图形学、软件工程学、自动控制学、工程力学、机械制造和计算机技术多门学科,多学科集成的设计技术具有显著的实际意义。 2) 基于模块化的设计理念 作品基于模块化的设计理念,以划分不同功能模块的方式进行作品设计,可以根据具体的要求进行功能模块组合,满足不同使用场合的要求。 3) 力反馈技术 作品对力反馈技术进行深入研究,利用机器人运动正解和反解原理,配合专门设计机械控制装置,探索虚拟现实技术中的力觉领域。 4) 器官的物理模型建模及快速三维重建技术 作品对虚拟手术中的软组织的物理建模和实时交互技术进行了较为系统、深入的研究,包括三维模型的建立、不同物理模型下的软组织变形、不同形式下的软组织切割效果、软组织在电灼术中的模拟、粘弹性的触觉反馈等。
科学性、先进性
- (1)自行设计的力反馈器机械臂,具有多自由度、大位移空间、定位精确以及反应灵敏等优点,并且拥有自主知识产权。(2)自行设计了基于DSP的实时仿真的硬件系统,打破了国外相关产品的垄断。(3)展开了关于器官的物理模型变形以及切割等形变的研究,丰富了我国虚拟手术领域的研究。(4)作品采用了基于模块化的设计理念,以划分不同功能模块的方式进行作品设计,从而使得本作品能够根据需要进行多种功能模块组合。
获奖情况及鉴定结果
- 无
作品所处阶段
- 作品目前已经处于最后的调试阶段
技术转让方式
- 专利实施许可
作品可展示的形式
- 实物、产品、模型、图纸、现场演示、图片、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品在国内属于前沿性研究与探索,一经开发完成,将是国内较早拥有自主知识产权的虚拟手术整套技术解决方案的产品。而目前国内各大中性医院及医疗科研机构对虚拟手术系统具有旺盛的需求,相对于这些机构目前购置的昂贵的国外成套设备,本作品因具有完全国内自主知识产权、模型逼真,反应灵敏、模拟力觉带宽大等优点,将具有广阔的前景。同时其力反馈装置可以设计通用接口,使其不局限于虚拟手术领域的应用,在其它行业,如虚拟装配、交互制作艺术品以及遥操作等领域都将拥有市场。
同类课题研究水平概述
- 具有力反馈的虚拟手术仿真系统有助于解决目前外科手术中存在的问题,通过操作力反馈器械控制虚拟手术器械与虚拟手术器官的交互,可使实习医生对不同的手术过程进行反复的交互训练,还可以让医生对不经常做的复杂手术重复练习以保持其手术水平,还有助于临床医生对将要做的手术进行规划、模拟,以便制定合理的手术方案。








