














基本信息
- 项目名称:
- 蓝色精灵--探测搭载平台
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 紧扣挑战杯“崇尚科学、追求真知、勤奋学习、锐意创新、迎接挑战”的宗旨,以“简捷高效,以人为本”为理念,我们设计了一款能够在第一时间,深入火灾或化学物质泄漏等人不能亲自去的一些灾难现场内部,具有强大避障、越障能力,以探测生源、提供基本生命维持设备、给受困人员带去希望与信心为目的的平台车模型来辅助救援。
- 详细介绍:
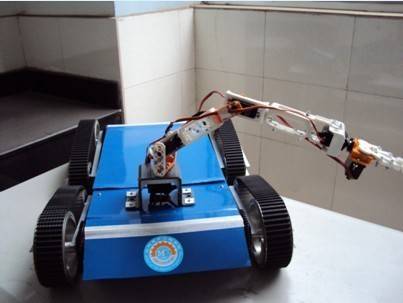
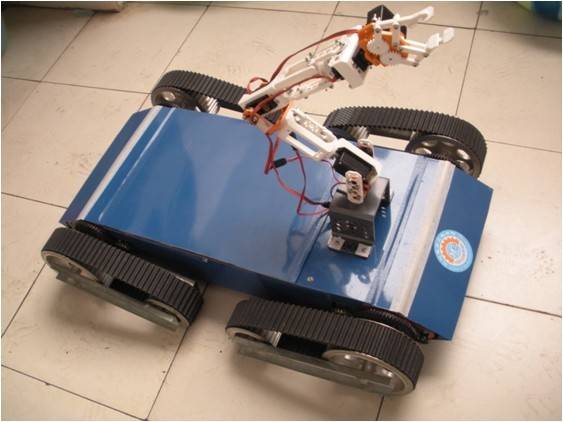
- 本作品采用模块化设计,便于检测与维护。制作有1个车体主控模块:是控制核心,由车体内部的机械机构和主控芯片组成,其余所有模块都以它为基础装配,采用红外遥控控制;4个独立越障驱动模块:安装在车体两侧,可以在直流电机的控制下实现二自由度的运动,即履带的平动和轮的转动,这样分别实现四个履带轮独立自主的360°自由摆动,从而协同工作,越过多种障碍,采用同步带/齿形带作为驱动履带,具有带传动、链传动和齿轮传动的优点,传动效率可达90%以上;1个机械臂模块:串联式5自由度(包括末端手爪),采用仿生学原理,能够模仿人的手臂关节弯曲来完成5自由度转动和抓取物体的功能,用来递送基本的生命维持设备。 具备三个主要创新点:1.车身小巧轻盈,结构对称,控制技术不复杂,主要偏向于机械设计上的创新,用简单的原理就可以实现预期的功能;2.综合了轮式和履带式结构的优点,在闭合反馈控制下实现二自由度的运动,四履带协同越障,极大提高了越障能力。爬陡坡,越宽壕,涉深水,克垂壁,穿沼泽,过田野,在复杂路面上无所阻挡;3.作为一个探测搭载平台,应该具备较充足的空间用来放置相关拓展设备。对车身内部进行优化设计,将重量尽可能安排在车身内部而不是四周,不仅方便越障模块功能的施展,同时降低整体的重心,使该平台车更加稳健。除了车身自重以外还可以承载的最大重量为14Kg。 拟实现有1个视频信号采集传输模块:将视频信息实时传输至地面,便于了解灾难现场情况,遥控救援车;1个生命探测模块:用于对受困人员的探测,可穿过墙壁,火焰,烟雾等;一个温馨唤醒模块:用闪烁的灯和音频发声的方式带来希望和信心,唤醒幸存者强烈的求生意识。 小巧轻盈的车体形态,简捷精巧的设计宗旨,使得本平台车可以很好地适应灾难现场的复杂环境而快速移动和争取时间。真正投产时,采用当今研制成功的耐火隔热防辐射材料作保护,本作品具有科研以及工程上的双重应用价值。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计、发明的目的:灾难时,救援人员只有约48小时寻找幸存者。我们旨在火灾或其它人不能亲自去的危险情况下,让机器人来完成艰巨任务,越障探生以辅助救援。本作品尤在布局复杂的现代建筑中可大显身手。 基本思路:纯机械结构,模块化设计。制作含有1个车体主控模块:内含电源、芯片和其余机构,采用红外遥控;4个独立越障驱动模块:安装在车体两侧,由直流电机和闭环控制完成履带二自由度运动,实现前进和越障功能;1个机械臂模块:串联式5自由度,用于递送基本生命维持设备。 创新点:1.简捷对称性:前后、左右在结构上分别对称,能以任何姿态进入和在现场移动。收回时主体外观为方型,降低复杂性以方便救援。2.协同越障能力:在直流电机和齿轮结构的控制下实现了履带的二自由度运动,即平动与转动,使每个越障模块可以独立摆动,从而在一起协同越障。具备履带和轮式结构的双重优势。3.5自由度串联机械臂:能够模仿人的手臂关节弯曲来完成功能,弥补了传统二、三自由度机械臂不能在整个空间内准确作业的缺陷。4.高度空间利用率:将重量尽可能安排在车身内部而非两侧,方便越障功能施展,同时降低整体的重心,使该平台车更加稳健。 技术关键:机械结构的设计、车身内部空间的优化布置、机械臂功能的实现、履带二自由度的控制。 主要技术指标:重:6Kg;宽:24cm(加履带39cm),长:50cm(加履带58cm),高:7.5cm;履带高:14cm;最大越障高度:23cm;爬坡角度:50°-60°。除去自重最大负载重量:14Kg。
科学性、先进性
- 行走机构形式的选择 传统轮式结构运行速度快、机动性好,但抓地力不够,而且在路面情况复杂的情况下往往寸步难行;现在常见的履带结构虽然驱动力大,抓地力较轮式结构有大提高,越野性能较高,但由于受履带轴心高度的限制,遇到垂壁障碍则束手无策。 我们采用同步带作为驱动履带,具有带、链和齿轮传动的优点。同步带传动由于带与带轮是靠啮合传递运动和动力,故带与带轮间无相对滑动,能保证准确的传动比。传动时传动比可达10,效率可达90%以上。传动噪音比带传动、链传动和齿轮传动小,耐磨性好,不需要润滑,寿命比摩擦带长。 设计的四履带协同越障平台综合了轮式和履带式结构的优点。四履带协同越障,极大提高了越障能力。爬陡坡,越宽壕,涉深水,克垂壁,穿沼泽,过田野,在复杂路面上无所阻挡。 高度空间利用率 作为一个探测搭载平台,应该具备较充足的空间用来放置相关拓展设备。我们对车身内部进行了优化设计,将重量尽可能安排在车身内部而不是两侧。除了车身自重以外还可以承载的最大重量为14Kg。
获奖情况及鉴定结果
- 无
作品所处阶段
- 模型制作完毕阶段
技术转让方式
- 委托中介转让商谈
作品可展示的形式
- 模型 现场演示 图片 录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 适应范围与使用说明 应用于楼层高、房间多、布局复杂的都市建筑突发火灾搜救作业中,例写字楼、摩天大厦等。用其它特殊材料及装载特定救援设备,也适于地震等人不能亲临现场的一些危险情况。时间紧迫、人命无价,工作时在第一时间,由消防云梯批量破窗投入,灭火和消防人员的救援同时展开,提高了救援工作的效率。也可拓展功能或与消防机器人配合使用。 技术特点和优势 具轮和履带式行走机构的双重优点,可越过多种障碍。外型小巧轻盈、结构对称、整体重心低,有利于在恶劣的灾难现场保护自我、快速移动以争取时间。 推广前景及市场分析 本模型总价格约3900元。实际投产中,真实比例估计有1:2的放大。因灾难环境特殊,车体、履带及其余暴露部分均要用特种材料。特种材料的价格因为相关领域的保密性或其他原因无法获取。工程制作过程(以火场为例)可以参考具有成熟技术的消防车或机器人。成本主要取决于特殊材料的价格。突发灾难时人命无价,具体应用时可视情况而定。
同类课题研究水平概述
- 许多国家都在研制军用、扫雷、排爆和消防机器人等危险作业机器人。作为危险作业机器人的一个分支,救灾机器人在国外发展迅速,技术日益成熟,并进入实用化阶段,日本、美国、英国等已开始装备使用。日本大阪大学研制出蛇形机器人,能在高低不平的模拟废墟上前进,其顶端带有一部小型监视器,身体部位安装传感器,可在地震后的废墟里寻找幸存者。美国iRobot公司研制了PackBot系列机器人,能适应崎岖不平的地形和爬楼梯,主要执行侦察、寻找幸存者、勘探化学品泄漏等任务。InuKtun公司研制了机器人MicroVGTV,机身可变位,采用电缆控制,含有直视的彩色摄像头,并带有微型话筒和扬声器,可用于与压在废墟中的幸存者通话,适于在小的孔洞和空间中执行任务。除前面的中小型救灾机器人,微型救灾机器人也正在研究中,美国加州大学伯克利分校研制出世界第一个苍蝇机器人,通过装在它脑袋上的微型传感器与微型摄像机,可以到倒塌的建筑物废墟底下或其他灾难场所寻找幸存者。 国内的研究刚刚起步,新兴而富有挑战性。中科院自动化所、国防科技大学、中国矿业大学、上海三家单位承担的863计划立项之一都已分别研制成功针对不同环境特点、侧重不同功能的救灾机器人。 目前,许多研究单位正致力于救灾机器人的多方面研究,以期救灾机器人的技术更加完善.今后的发展趋势有以下四个方面:移动机构、导航与定位、控制方式及组建机器人救灾队。 在灾难中,救援人员只有非常短的时间(约48小时)深入灾难现场内部寻找幸存者,否则发现幸存者的几率几乎为零。在这种紧急而危险的环境下,救灾机器人可以为救援人员提供帮助。当人口城市化和城市人口密集现象的加剧,使得具有楼层高、房间多、布局复杂特点的城市建筑环境中的突发火灾搜救作业十分艰难而危险,每年都有多名消防战士牺牲在火场上。 我们设计的这个探测搭载平台车功能专一,偏于机械设计上的创新,因而整个系统不复杂、易于实现且稳定性较好,作为一个搭载平台,还可以进行其余相关功能的拓展。该作品打破了传统消防救援工作的搜寻无目的性,在第一时间进入火灾现场辅助消防人员搜救,对于救援工作具有指导意义,力图能在最短的时间里救出尽可能多的幸存者。可以视实际的制作成本,批量生产,组建机器人搜救队与消防车和消防人员联合救援。同理在化学物质泄漏等人不能亲自去的场合也可以发挥作用。








