














基本信息
- 项目名称:
- 嵌入式智能网球拾取机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
- 现在已步入二十一世纪,机器人已逐步进入我们的生活,在现实生活当中,有着许多危险和繁重的工作,而如果能将这些工作交与机器人,将极大的解放人的双手,此项目就是从这点出发的,完成一个自动拾取网球的机器人,利用机器人来代替人工作。建立了一个完整的机器人平台,这个平台不仅仅只能用来拾取网球,而在这平台中,我们可以这个机器人做许多事,例如救灾,做家务等等。
- 详细介绍:
- 本的机器人利用“双脑”嵌入式系统,实现图像获取与识别,和基于GPS的路径规划,以实现全智能,高精度,抗干扰的智能网球拾取机械人系统,实现了思维和行动的分离。项目中,利用ARM s3c2440作为决策,图像识别,网络传输的中心,而利用51单片机作为控制的中心,如人体当中的大脑和小脑的关系,做到决策和控制分离。目前市面上的机器人均是采用单CPU结构,但我们的“双脑”结构比“单脑”结构更加稳定(如对过流的保护),对CPU频率的要求更低(将计算工作分给两个CPU计算),开发更加快捷简单(并行开发),而且成本不会因此而有太大的上涨。目前的机器人的应用平台都较为狭隘,只能作某一特定用途。但我们的机器人系统只需经过一些小修改就可以适用于其他场合和对象。这些创新点都能为未来的机器人开发提供较为新颖的开发思路,从而加速机器人的发展进程。
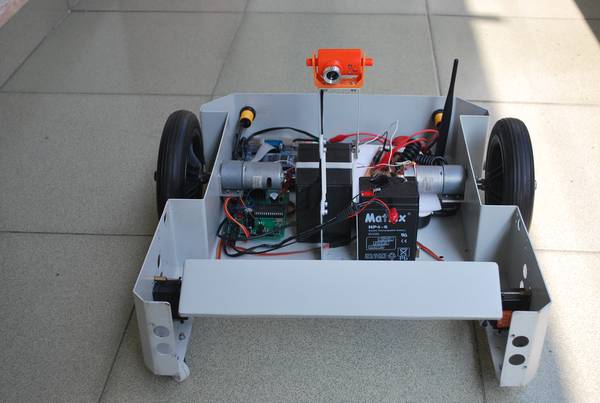
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 利用嵌入式系统,实现图像获取,图像识别,机电控制,路径优化规划等,达到自动为网球运动员在全场范围内拾取网球,让球员可以更加专心,方便,省心地练习和比赛,并极大地节省馆场开支费用。系统目标是:通过自身的GPS模块和图像识别功能,实现智能地在整个网球场上自动拾取网球,并将网球放置在一个固定地点,而且在探索和拾取的过程中不能妨碍网球员的练习或比赛。系统可经过修改后以使用拾取其他球,例如乒乓球,羽毛球等。技术创新点是,与其他机器人不同,我们的机器人具有双脑结构,能够实现机器人决策和控制的分离,从而提高了系统的安全性,推进了开发进度,并为未来研发机器人的工程师提供了新思路。该机器人系统的技术关键包括硬件机器人设计,ARM板驱动与开发,图像获取与识别等。主要技术指标有:物体识别率,物体捕获率。
科学性、先进性
- 与其他机器人不同,我们的机器人利用“双脑”嵌入式系统,实现图像获取与识别,和基于GPS的路径规划,以实现全智能,高精度,抗干扰的智能网球拾取机械人系统,实现了思维和行动的分离。在项目中,利用ARM s3c2440作为决策,图像识别,网络传输的中心,而利用51单片机作为控制的中心,如人体当中的大脑和小脑的关系,做到决策和控制分离。目前市面上的机器人均是采用单CPU结构,但我们的“双脑”结构比“单脑”结构更加稳定(例如对过流的保护),对CPU频率的要求更低(将计算工作分给两个CPU计算),开发更加快捷简单(并行开发),而且成本不会因此而有太大的上涨。目前的机器人的应用平台都较为狭隘,只能作某一特定用途。但由于我们的机器人系统具有完整的硬件系统和软件系统,所以只需经过一些小修改就可以适用于其他场合和对象。这些创新点都能为未来的机器人开发提供较为新颖的开发思路,从而加速机器人的发展进程。
获奖情况及鉴定结果
- 2010年本作品被评为广东省大学生创新性实践项目
作品所处阶段
- 本项目已经完成
技术转让方式
- 无
作品可展示的形式
- 本作品以实物、现场演示、图片以及录像的形式展现出来
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 现在已步入二十一世纪,机器人已逐步进入我们的生活,在现实生活当中,有着许多危险和繁重的工作,而如果能将这些工作交与机器人,将极大的解放人的双手,此项目就是从这点出发的,完成一个自动拾取网球的机器人,利用机器人来代替人工作。项目之中,利用了现图像获取,图像识别,机电控制,路径优化规划等一系列人工智能的技术,实质上这就建立了一个完整的机器人平台,这个平台不仅仅只能用来拾取网球,而在这平台中,我们可以这个机器人做许多事,例如救灾,做家务等等。所以,只要此平台建立了,我们很容易做出其它各种功能的机器人,具有很高的市场前景。
同类课题研究水平概述
- 时至今日,机器人已从第一代示教再现型机器人、第二代带感觉的机器人发展到第三代智能机器人,而服务机器人正是第三代机器人的典型代表。目前国外的科学家们在移动机构设计、传感器融合与环境建模技术、路径规划技术、能源技术、智能控制技术、人机交互技术、成本控制等方面都取得了长足的进步。本田公司的双足机器人“ASIMO”,步行时速达3km几乎与人类相同。三菱重工的家用机器人“Wakamaru”能识别家庭成员的脸部特征,并通过转动脸部和手腕来表现喜怒哀乐。美国的“InTouch Health”远程医疗机器人具有时双向的视频和语音传送系统以及行走系统,已成为医与患者之间的连心桥。配备有各种检测装置的机器人保更成为美国军方后勤部门以及各大公司的新宠。根据联合国欧洲经济委员会(United NatioEconomic Commision for Europe,UNECE)统计,计2003年底,全球服务机器人总台数约为132万台,其中教育娱乐机器人与家务机器人分占第一、二名,各为6台与60万台,占52.39%、45.98%。国际机器人联合会在球机器人相关发展调查报告中指出,自2004至2007年服务机器人产量大幅成长为670万台,而各种不同使用别的机器人中,家务机器人将跃升成为主流,占总产量61.83%,教育娱乐机器人则降低所占比例为37.25%,居第二位。该项变化的主要原因在于,在机械控制技术趋成熟的情况下,从事有目的活动的家务辅助机器人,可发展到使用者所需要的水平,因此在该类型机器人数大幅增加的情况下,预计将会挤压娱乐机器人占有比例日本机器人协会的调查报告显示,工业机器人未来成长空间已经十分有限;反观服务机器人将有大幅成预估2010年约有171亿美元,2025年将有517亿美元的市规模。英国半导体行业研究机构(VLSI Research)调查估,至2010年全球智能机器人市场将达593亿美元,而能机器人所需各种零组件相关市场商机也达数十亿美元上。韩国信息通信部调查研究报告指出,2012年全球智机器人产值将高达2500亿美元。虽然各种统计数据对机人的种类划分不是很统一,导致预测结果有差异,但都明了服务机器人未来良好的发展态势。 重要的是,目前主流的机器人都没有像我们采用双脑结构,基于GPS的路径规划系统,和机器人在体育竞技上面的应用。因此我们的作品具有非常广泛的应用前景!







