














基本信息
- 项目名称:
- 基于外骨骼的智能手部康复训练装置
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品旨在针对手部中风患者和肌肉衰退老年人,研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,动作量化、精准,自动运行、可观测,并建立数据库,在患者的个体差异性问题上,进行有针对性的治疗,也为医生提供全面、定量化的分析依据,促进康复医学的发展。
- 详细介绍:
- 本作品旨在针对手部中风患者和肌肉衰退老年人,研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,动作量化、精准,自动运行、可观测,并建立数据库,在患者的个体差异性问题上,进行有针对性的治疗,也为医生提供全面、定量化的分析依据,促进康复医学的发展。 本课题旨在研究一种基于外骨骼的手部康复训练装置,其可穿戴在患者手上,对患者手部进行量化、精准的康复治疗,自动运行、可观测,并建立...(查看更多)
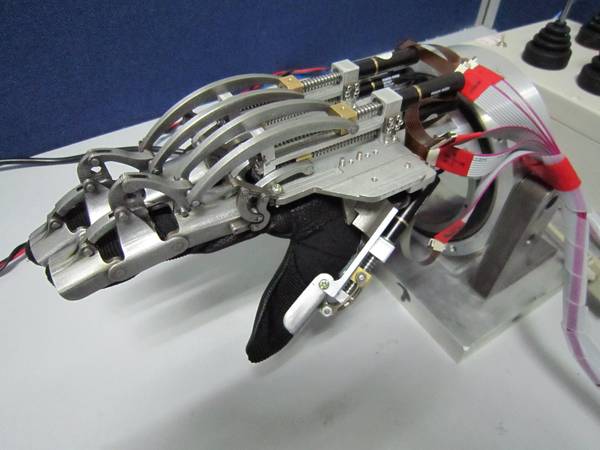
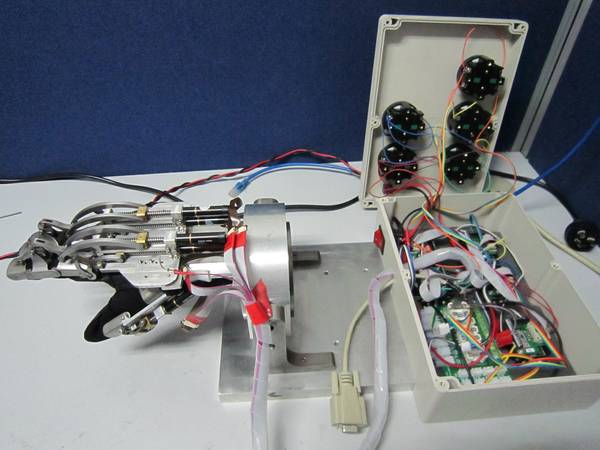
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 一、目的:针对手部中风患者和肌肉衰退老年人,传统康复训练的不足在于:过于依赖医生的经验;掌握方法的医生很少,偏远地区无法治疗;对于病人的个体差异性问题,缺乏相应的针对措施。而智能机器人灵巧手动作量化精准、自动化、过程可控可观测。将其与可穿戴外骨骼技术融合,即为前述问题的解决方法。作品旨在研究一种基于外骨骼的手部康复训练装置,可穿戴,动作量化,可建数据库,对个体差异,进行有针对性的...(查看更多)
科学性、先进性
- 本作品的先进性体现国内外手部外骨骼康复技术处于起步阶段,尚无成熟研究;科学性则体现在合理的结构方案及控制方案。 现阶段大部分研究者着重于单只外骨骼的研究,遇到的问题有:外骨骼本身及其动力源、控制系统等会给使用者带来额外的负担;单指结构虽然更容易,但在人手主要动作方面,则很难考虑周全。另一方面,传动方式上,现有的钢丝绳柔性传动只能单向受力,而连杆刚性传动因手指末端自由度距机架过远,...(查看更多)
获奖情况及鉴定结果
- 1、校赛“挑战杯”科技作品竞赛,A类,一等奖。 2、省赛“挑战杯”科技作品竞赛,A类,一等奖。 3、省新华医院(三甲)脑科,初步病例实验,具备临床可行性。4、作品论文Design of a Hand Exoskeleton Rehabilitation Device 被2011 International Conference on Mechatronics and Materi...(查看更多)
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 1、实物 2、现场展示 3、图片
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 一、使用说明首先登陆数据库,新建或者读取专属数据文件;穿戴上外骨骼;医生对康复训练模式进行选择;患者手指在外骨骼的带动下动作;切换不同动作、速度;训练完成,患者数据载入数据库;医生根据数据给出相关指导意见。二、特点、优势及适用范围、推广前景 1、技术特点包括:拟人化仿生设计;固定式8自由度抓握模型,多连杆机构传动;二级控制系统,实时采集患者运动信息;数据库管理患者信息。 2、随之...(查看更多)
同类课题研究水平概述
- 机械外骨骼技术早在上世纪就已被提出,并尝试运用于军事领域;同时,也对康复治疗和灾害救援提供了全新的思路,因而被广泛关注。进入2000年后,以美日为代表,机械外骨骼技术进入了快速发展阶段。国内有关机械外骨骼技术的研究最早见于2004年左右,医疗康复是其主要研究方向。开展相关研究的主要有河北工业大学、哈尔滨工业大学、浙江大学等相关科研机构。(一)上肢外骨骼的研究 1)外骨骼最早的研究...(查看更多)








