基本信息
- 项目名称:
- 震灾幸存者搜索机器人
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 能源化工
- 大类:
- 科技发明制作B类
- 简介:
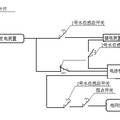
- 针对地震灾后环境特征,利用SOPC技术和NiosII软核处理器设计并实现了地震灾区幸存者搜索定位机器人系统。系统采用组合式履带移动车体结构、脱机工作方式、自主导航,并采用双操作系统,能够灵活行进、越障、爬坡,具有超声波激光避障、人体检测、声音采集定位、广角度现场视频采集、温湿度、烟雾指数检测、光控照明、GPS卫星定位、电子罗盘定向、Zigbee无线组网通信、上位机与手持终端远程监控、运输等功能。
- 详细介绍:
- 研究了典型开放的复杂巨地震灾害系统的开放性、复杂性、高维性、不确定性以及涌现性等整体特性及地震救援面临的主要影响因素,分析了微型救援机器人在地震救援当中的优势和参数要求。针对地震救援的功能需求、地震灾后救援的复杂环境特点和技术要求,我们设计并实现了一种采用脱机工作方式的震灾幸存者搜索机器人,能够在地震灾后苛刻复杂的环境现场完成震后环境检测、灾难现场多角度视频采集、幸存者搜索定位等工作。 本作品采用组合式履带移动车体结构,主要由越障器、履带推进器、旋转连接器三部分组成,通过超声波激光联合避障模块采集道路信息,能够灵活的行进、越障、爬坡,以适应地震现场复杂的路面状况。使用SOPC(System on Programmable Chip,可编程片上系统)技术定制的NiosII软核处理器作为系统控制和处理核心,在机器人车体上安置有GPS卫星定位装置、多角度无线视频采集装置、温湿度传感器、烟雾传感器、二氧化碳传感器等一系列环境检测装置,并设计采用人体红外检测和声音定位相结合的方式搜索遇难者,并对遇难者的具体方位进行定位。所有的环境信息及幸存者信息都将符合Zigbee协议的无线自组网模块传回总部上位机,为接下来的震灾救援工作提供重要环境数据依据。此外,机器人配有手持终端设备,能够实现与PC机相同的显示功能。通过手持终端无线连网,也可以通过网页远程监控访问手持终端。本作品的搜索机器人还具有自动光控照明、声光提示、运输等功能。 每一个功能完善的搜索机器人都是一个单独的环境及人体检测节点,同时在救灾现场投放多台机器人组成的无线环境及人体检测网络,实现整个救援机器人车队的自组网,多点采样、大面积搜索、多角度检测,相互之间共享救援信息、协调工作,并最终将各种探测信息发送至PC机上显示,能够成倍的加大检测、搜索面积,并增大幸存者搜索成功的可能性。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 作品设计目的:在世界各地,地震以及由地震引起的次生灾害频繁发生。目前,地震救灾方式多为人工救援,而且一般救护人员无法进入危险区域,这种救援方式的救灾周期长,危险性大,不但延误了救援的最佳时机,而且对救援人员自身的生命安全造成了极大的威胁。因此,研究一种地震救援新装备,用机器代替人力在危险区域内搜索幸存者,对其进行定位是项非常紧迫并且具有现实意义的任务。 技术创新点:1.智能化程度高,可以采用远程遥控和自主导航两种工作模式;2.机械性能强,采用组合式履带移动车体结构,越野性能好;3.搜索功能强大,采用人体检测与声音定位相结合的二元搜索定位模式;4.在未来可实现无线多机器人的自组网环境检测及人体搜索同步技术。 技术关键点:1.基于SOPC技术的NiosII控制平台的软硬件联合设计;2.越障机械结构设计及移动车体的自主道路识别算法;3.人体检测和声音定位二元数据融合的识别定位算法;噪声环境下的声音信号采集、滤波、识别的软硬件设计;4.机器人与总部上位机之间的远距离无线数据通信及远距离无线广角度监控技术。 主要技术指标:人体红外检测最大有效距离:3~5m;声音频率检测范围:300~3400Hz;最大有效距离:4m;越障高度:16cm;无线视频传输距离:150~250m;可连续工作6h。
科学性、先进性
- 科学性:1.本作品实现了救援机器人的集成创新,功能完善;2.本作品工作在特定环境下,具有相应的特定功能;3.本作品根据实际技术需求设计,所有的技术均能够适应相应的指标需求;4.本作品是基于SOPC及NiosII软核技术,采用人体热释红外识别与声音定位相融合的方法搜索废墟中的幸存者的救灾机器人,经教育部科技查新工作站(L17)鉴定,在国内尚未见相同文献报道,为完全自主研发的先进科技作品。 主要参考文献:[1]甘建军,黄润秋,李前银,都江堰-汶川公路汶川地震次生地质灾害主要特征和形成机理,地质力学学报,2010;[2]田小甫,孙进忠,陈奇,汶川地震后四川省巴州区地质灾害特征研究,工程地质学报,2009;[3]夏宇闻,《Verilog SOPC高级实验教程》,北京航空航天大学出版社,2009;[4]董晓坡,王绪本,救援机器人的发展及其在灾害救援中的应用,防灾减灾工程学报,2007。
获奖情况及鉴定结果
- 1.获得一项发明专利受理通知书,专利申报号为201110105723.4;另有一项发明专利和一项实用新型专利正在审核。 2.本作品于2011年4月26日在教育部科技查新工作站(L17)进行科技查新,科技查新报告表明国内查新未见相同中文文献报道。 3.本作品于2010年9月2日获得XX省电子设计大赛“Altera杯”SOPC专题竞赛中获得省一等奖(使用本作品中的SOPC及NiosII软核处理器技术)。 4.本作品于2010年9月28日获得Altera亚洲杯创新设计大赛全国二等奖(使用本作品中的无线视频采集、图像处理技术)。 5.本作品于2011年6月3日获得XX省第八届“挑战杯”大学生课外学术科技作品竞赛一等奖。
作品所处阶段
- 目前作品的所有基本功能都已实现,并完成了各项功能测试及模拟复杂环境下的适应能力测试并通过测试。
技术转让方式
- 专利出售或自主创业
作品可展示的形式
- 1.实物 2.现场演示 3.录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 使用说明:本作品搜索定位机器人为脱机工作模式、可自动完成幸存者搜索、定位、环境监测、现场视频传回、环境数据传输等一系列任务。监控人员只需在总部微机上安装视频接收软件及上位机监控软件(自主开发)即可观察到灾难现场的实际情况、环境数据、机器人的精确位置,还可以通过上位机软件和手持终端对机器人的动作进行人为干预或者调整摄像头的拍摄方位。 适用范围及市场分析:本作品震灾搜索定位机器人体积小、行动灵活、功能完善,适用于地震发生后救援人员不方便进入的危险区域或者狭窄区域,能够替代救援人员完成搜索任务,降低二次灾害对救援人员生命安全的威胁。目前,国内市场上类似产品比较缺乏,且大多造价昂贵,在40万到200万不等。本作品震灾搜索定位机器人由于采用最新的SOPC技术使得其开发周期和成本都大大降低,真正大范围的应用到救灾现场将成为可能,必将带来巨大的社会经济效益。
同类课题研究水平概述
- 在国外,救援机器人发展迅速,技术日益成熟,并进入实用化阶段。美国、日本等国家都先后投入到救灾机器人的研究当中。据报道,日本的救灾机器人包括如下几类:蛇形搜救机器人Snakebot,、东京消防厅(Tokyo Fire Department)使用的RoboCue机器人、日本千叶理工学院(Chiba Institute of Technology)制造的Quince机器人等。 在国内,救援机器人的研究刚刚起步,但进展很快。2002年中科院沈阳自动化研究所机器人学国家重点实验室研制了空中搜索探测机器人、废墟洞穴搜救可变形机器人、废墟表面搜救机器人。空中搜索探测机器人进行了昼间低空灾情侦察、夜间被困人员搜索、投放救灾物资、喷洒防疫药品等功能的演示。废墟洞穴搜救可变形机器人进行了地震灾后幸存者搜索与辅助救援应用演示。废墟表面搜救机器人对假设的内部情况不明的危险区域进行侦测。中国矿业大学可靠性工程与救灾机器人研究所于2006年6月研制了我国第一台用于煤矿救援的CUMT-1型矿井搜救机器人。这些机器人都还处于示范性应用阶段。 目前市场上的救援机器人比较匮乏,但也有少量供应消防、防爆机器人等类型的救灾机器人。如安徽一家电子科技公司生产的专业消防机器人,采用的是全履带式的移动车体结构,能够在废墟中行走,越过高度小于25cm的障碍物,安装有1个全景摄像机2个微型摄像机,具有信息传输功能。但是这种机器人上未携带任何的传感器,不能对环境进行检测,也不能对生命信息进行检测,应用范围有限。目前国内市场上还没有真正环境适应能力较强,功能完善的救援机器人。 本作品利用SOPC技术和Nios II软核处理器设计并实现了地震灾区幸存者搜索定位机器人系统。系统设计采用脱机工作方式、自主导航,可在苛刻复杂的环境现场完成搜救工作。机器人设计采用双操作系统,能够灵活的行进、越障、爬坡,最大可越过16cm的障碍物,具有超声波激光避障、人体检测、声音采集定位、广角度现场视频采集、温湿度检测、烟雾指数检测、自动光控照明、GPS卫星定位、电子罗盘定向、Zigbee协议无线组网通信、上位机远程控制、手持式终端操控、运输等功能,使用了最新的Nios II软核控制技术,定位精度较高、功能完善。