














基本信息
- 项目名称:
- 仿生偏振光导航方法及其关键技术研究
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 信息技术
- 大类:
- 科技发明制作A类
- 简介:
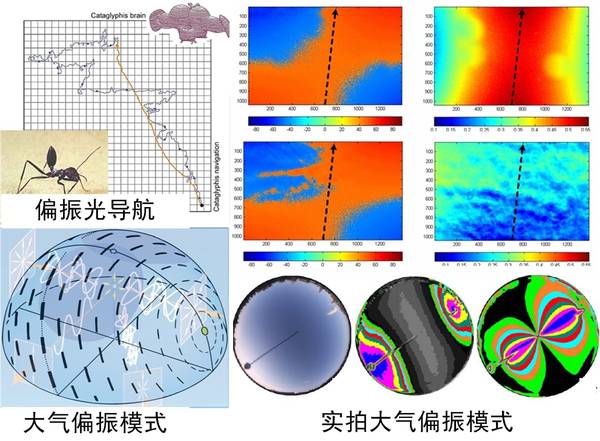
- 本作品针对利用自然特性的自主导航方法,以沙蚁等生物高度敏感的偏振视觉感知与导航功能为仿生基础,以太阳光在大气中传输的偏振特性为理论依据,从信息获取和信号处理的角度,研究仿生偏振光导航方法及其关键技术。通过对沙蚁等生物的偏振光敏感机理和大气偏振模式的研究,建立了仿生偏振光导航方法框架,设计并研制了仿生偏振光导航传感器,并在此基础上,研制了组合导航移动实验系统,实现了利用自然偏振特性的自主导航。
- 详细介绍:
- 仿生偏振光导航是一种新型自主导航方法,天空中的大气偏振模式蕴含重要的方向信息,许多生物利用大气偏振模式来获得方向信息实现偏振光导航。本作品针对陌生环境下的自主导航,以沙蚁高度敏感的偏振视觉感知与导航功能为仿生基础,以太阳光在大气传输的偏振特性为理论依据,从信息获取和信号处理的角度,研究仿生偏振光导航方法及其关键技术。 作品系统研究了大气偏振模式分布特性及利用大气偏振模式获取导航信息的方法,通过模仿沙蚁的生物导航机理,以及沙蚁POL-神经元的阵列信号处理方法,研究由大气偏振模式获取导航信息的技术,设计了偏振光导航传感器,实现了由大气偏振模式到罗盘信息的准确提取以及在陌生环境下利用自然偏振特性的自主导航。此外,本作品在上述基础上,设计了偏振光/地磁组合导航方法,研制了组合导航移动实验系统,实现了对不同导航方式下导航信息的综合获取,实现了多种信息源下基于地球自然特性的自主导航。 本作品应用于导航定位技术领域,市场前景广阔,尤其在军事领域,飞行器或运动载体在特殊环境下利用地球自然特性进行导航和定位,是保证军事安全的一个重要因素,因此本作品更具有十分重要的军用价值。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的思路 本作品针对利用自然特性的自主导航方法,以沙蚁等高度敏感的偏振视觉感知与导航功能为仿生基础,以太阳光在大气中传输的偏振特性为理论依据,从信息获取和处理角度,研究仿生偏振光导航方法及其关键技术。通过对沙蚁等偏振敏感机理和大气偏振模式的研究,建立基于自然偏振特性的仿生偏振光导航方法,设计并研制了偏振光导航传感器,在此基础上研制了组合导航系统,实现了基于自然特性的自主导航。 创新点 (1)模仿沙蚁的生物导航机理,有效利用了大气偏振模式信息,实现了基于自然偏振特性的自主导航; (2)提出了仿沙蚁POL-神经元的信号处理方法,阐明了大气偏振模式特性与规律,实现了由大气偏振模式到航向信息的有效获取; (3)设计了以仿生偏振光导航为主,辅以地磁信息的组合导航算法,并研制了基于嵌入式技术的组合导航移动平台,为导航系统提供了实验与验证手段。 技术关键 (1)基于自然偏振特性的仿生偏振光导航机理与方法; (2)仿沙蚁POL-神经元的偏振信息感知与信号处理方法; (3)偏振光/地磁组合导航算法及组合导航平台系统实现技术。 技术指标 (1)研制的仿生偏振光导航传感器能提供稳定的航向角信息,晴朗天气下航向角测量误差优于0.2°,多云天气下误差不超过0.5°; (2)机器人平台具备在运动状态下进行大气偏振信息检测和航向信息实时获取的能力,能够利用偏振光、地磁信息或两者的组合导航信息实现多种信息源下的导航。组合导航误差优于0.2°,平台导航误差小于5°、定位误差小于100cm。
科学性、先进性
- 随着科技发展,导航技术应用越来越广泛,但大多依赖于电波在空间传播,对系统生存和抗干扰能力都十分不利,仿生偏振光导航是一种基于自然特性、难被人为因素干扰的新型自主导航方法,对解决陌生环境下自主导航与定位的科学问题具有重大的指导意义,成为导航发展的重要方向。 目前国内外大多致力于偏振光导航机理研究或将其作为简单辅助手段,未能真正实现偏振光导航,这些正是本作品研究工作的出发点。本作品重点研究仿生偏振光导航方法及其关键技术,通过偏振光导航传感器和移动平台的研制,从理论研究和技术实现两个层面实现了仿生偏振光导航。 作品深入开展了仿生偏振光导航技术的研究,系统研究了大气偏振模式分布特性及利用大气偏振模式获取导航信息的方法;效仿沙蚁POL-神经元的阵列信号处理方法,研究由大气偏振模式获取导航信息的技术,设计了偏振光导航传感器,实现由大气偏振模式到罗盘信息的准确提取;此外本作品还研制了组合导航系统,设计了偏振光/地磁组合导航方法,并搭建了组合导航移动平台,实现多种信息源下基于地球自然特性的自主导航。
获奖情况及鉴定结果
- 获奖情况: [1]本省第四届“挑战杯”大学生课外学术科技作品竞赛特等奖; [2]本校第十二届大学生课外学术科技作品竞赛特等奖。 学术论文: [1]Bionic Cataglyphis Polarization Navigation Research [C]. Hefei-Heilbronn Workshop on Reasearch and Education in Mechatronics. [2]大气粒子散射特性及其对空间偏振分布的影响[J]. 光学学报. [3]用于仿生偏振光导航的一维扫描式大气偏振信息检测方法[C]. CPGPS2010论坛. [4]仿生POL-神经元的偏振光导航传感器研究[J].传感器与微系统.
作品所处阶段
- 系统改进与调试阶段
技术转让方式
- 技术转让
作品可展示的形式
- 实物、产品以及现场演示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1.作品使用说明及技术特点 本作品研究了仿生偏振光导航方法及其关键技术,建立了基于自然偏振特性的仿生偏振光导航方法框架,在此基础上设计了仿生偏振光导航传感器,可以对自然偏振模式信息进行采集,实现由大气偏振模式到航向信息的有效获取,实现了陌生环境下的自主导航。 此外,本作品在包含新型偏振光导航模块基础上,引入地磁导航,以嵌入式处理器为核心,有效集成偏振光、地磁导航模块,实现对不同导航方式下信息的综合获取,引入多功能移动载体和远程控制中心来承载并监控移动平台,接收并综合优化处理导航信息,提高组合导航系统性能,适应不同环境下的导航要求。 2.作品的适用范围、推广前景及市场分析 本作品适用于导航定位技术领域,特别适合弱/无卫星导航信号的陌生环境下的自主导航,还可以与其它导航模块结合,实现基于自然特性的自主组合导航。作品市场前景广阔,利用地球一些自然特性进行导航和定位,是保证军事安全的一个重要因素,具有十分重要的军事应用价值。
同类课题研究水平概述
- 随着科技发展,导航技术有着越来越广泛的应用,大多数传统导航方式依赖电波在空间中的传播,对系统的生存和抗干扰能力十分不利,基于自然特性的自主导航方法难受人为干扰,成为导航发展的重要方向。大气偏振模式蕴含方向信息,可提供一种新的导航手段。因此开展仿生偏振光导航方法与技术的研究,对解决陌生环境下自主导航与定位的科学问题具有重大的指导意义。 根据国家和科学研究的需求,本团队成员所在实验室自2003年开始,围绕大气偏振信息及其应用开展了大量的研究工作,并获得了多项863项目支持,先后完成了对大气偏振模式获取方法和装置的研究,针对大气偏振模式建模仿真、大气偏振模式探测等关键问题开展深入研究,申请并获得了多项发明专利。 基于大气偏振模式的仿生偏振光导航,利用地球固有的自然偏振特性,对实现在弱无卫星信号下自主导航与定位具有十分重要的应用价值,越来越多的研究机构开始这一方向的研究。目前国外对仿生偏振导航的相关研究主要集中在对沙蚁等昆虫的生物行为与机理研究方面,瑞士苏黎世大学动物学研究所的Wehner教授领导的研究小组,对沙蚁生物行为与机理进行了长达几十年的深入研究,同时也设计了仿沙蚁导航机器人用于验证和实现沙蚁的各种导航行为。在偏振罗盘信息的获取方法上,Labhar等提出Point-source法及相应检测装置。但由于专业局限性,对大气偏振模式本身及其获取方法没有深入研究,在仿沙蚁偏振光检测与导航方面没有突破性进展。 在国内,仿生偏振光导航研究虽然起步较晚,但也取得了一定的研究成果,特别是近几年,更多的研究机构开始了相关研究工作,如中科院上海光机所、哈尔滨工业大学、大连理工大学、北京大学等等。大连理工大学的褚金奎教授根据Point-source法研制了一种基于金属光栅的偏振器。北京大学的晏磊教授在2009年分析了单次散射条件下的偏振理论与偏振模式图动态变化。西北工业大学的周军教授综述了利用偏振光进行大气层内运动体导航的研究进展,分析了航天器空间自主姿态确定与导航的优点与前景。总体上看目前国内在仿生偏振自主导航领域的研究,大多只是提出了不同的理论方法和做了相关的仿真实验,而对于偏振光检测传感器的研究设计,大多采用传统的单一光电模型设计模式,目前研究将偏振光导航方法融入组合导航系统中也逐渐在国内兴起,哈尔滨工业大学的卢鸿谦博士在理论上研究了引入偏振光导航来辅助组合导航系统的可行性。







