














基本信息
- 项目名称:
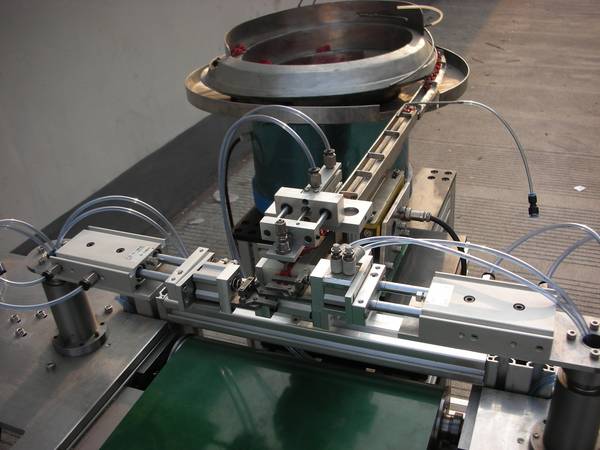
- 贴接法自动蔬菜嫁接机器人的研制
- 来源:
- 第十二届“挑战杯”作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 我国蔬菜瓜果种植过程中嫁接需求量大且因季节原因集中短期内作业因此劳动强度巨大,在劳动力成本持续升高的今天机械化自动嫁接已成为趋势。本项目接合我国蔬果种植特点研制出了适合多种蔬果的嫁接机器人,其嫁接速度最高可达720株/小时且嫁接成功率大于92%,其速度是手工嫁接的三倍以上,以三倍于人工嫁接的速度计算,自动嫁接可为嫁接环节省去60%以上的劳动力。产品目前处于中试阶段,其推广前景优良。
- 详细介绍:
- 蔬菜嫁接技术是提高植株抗土传病害的能力、提高植株抗逆性、提高产量的有效途径。蔬菜自动嫁接是基于嫁接理论的一种集机械、自动控制与计算机视觉于一体的自动化装备,是替代人工嫁接的有效途径。以西瓜为例,2010全国年产量近6600万吨,以3倍于人工嫁接的速度计算,自动嫁接可为西瓜嫁接环节省去60%以上的劳动力。 本项研究针对我国蔬菜种植面积大,机械化作业程度和装备水平低这一现...(查看更多)
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 嫁接技术能够很好的解决作物连作障碍,因此日本等国已展开并研制了相当数量的嫁接机器人然而其嫁接设备始终未能大规模产业化,究其原因还是归结于嫁接机器人对工厂化、机械化育苗的高度依赖,因此针对国内农场规模较小,机械化作业水平低的现状,研制适合我国国情的嫁接设备将大大减少农民的劳动强度,提高农业机械化水平。 项目立足国内嫁接作业时嫁接苗长势不一、方向各异等特点,研究的创新点...(查看更多)
科学性、先进性
- 由于国内嫁接设备均处于试验研制阶段,本项目将日本嫁接机作为比较对象。 从技术层面,日本的嫁接机器人技术较为成熟采用全自动嫁接,嫁接速度大于600株/时,嫁接成功率大于90%,本项目研制的嫁接机器人在速度上稍逊于日本设备,其原因在与日本高速的嫁接机器人采用多株苗同时嫁接(要求工厂化育苗使其具有高度一致性,国内设备无法配套)。 从实用性方面,日本嫁接机器人主要针...(查看更多)
获奖情况及鉴定结果
- (1)2011“挑战杯”校决赛特等奖; (2)2011省第十二届“挑战杯”大学生课外科技作品竞赛特等奖、最佳创意奖; (3)《Development of an improved robotic graft system for gourd type vegetable seedlings》一文被美国机械工程协会主办的机械工程领域国际峰会“ASME 2011 I...(查看更多)
作品所处阶段
- 中试阶段
技术转让方式
- 无
作品可展示的形式
- 实物、图片、视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 嫁接机器人的嫁接对象主要包括瓜科作物,包括西瓜、黄瓜、甜瓜等,更换部件也可嫁接茄科作物如西红柿、辣椒等。 蔬菜嫁接人工作业技术要求精细,费时、费工、费力、工作效率低。据调查,一个熟练的工人,在平均劳动强度下,采用靠接法,嫁接效率约为 120 株/小时,以一亩地需苗数 3300株为标准,则每亩约需 27.5 个工时,而且由于时令要求,需在短期内处理大量的苗,为争取速度,加快...(查看更多)
同类课题研究水平概述
- 国内外嫁接机的研究主要集中于日本、韩国和中国。 蔬菜嫁接机的研究最早始于1986年的日本,1987年到1991年先后研制出半自动形式1号样机G871、2号样机G892和全自动式的嫁接试验台架,均采用贴接法和夹子固定。1993年日本井关公司同生研机构协作推出了商品化GR800B型半自动瓜科作物嫁接机以及GR800T型半自动茄科作物嫁接机,生产率为600株/时。日本洋马公...(查看更多)








