














基本信息
- 项目名称:
- 仿生机械尺蠖
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 尺蠖又名“弓背虫”,是一种柔软的无脊椎爬行动物,他的爬行方式非常独特,靠身体的弓背——前伸爬行。本作品采用可编程模块化结构设计,首次模拟了尺蠖独特的爬行步态,并对其步态首次进行了建模分析和数字仿真等研究。 通过样机实测,得到了很好的爬行效果。越障和负债性能良好。可在多种复杂地形执行各种任务。
- 详细介绍:
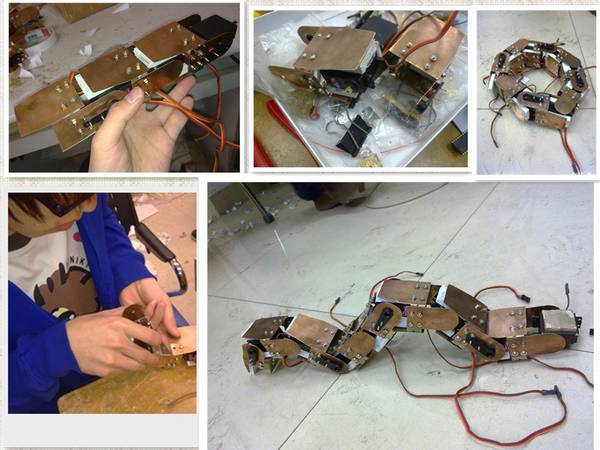
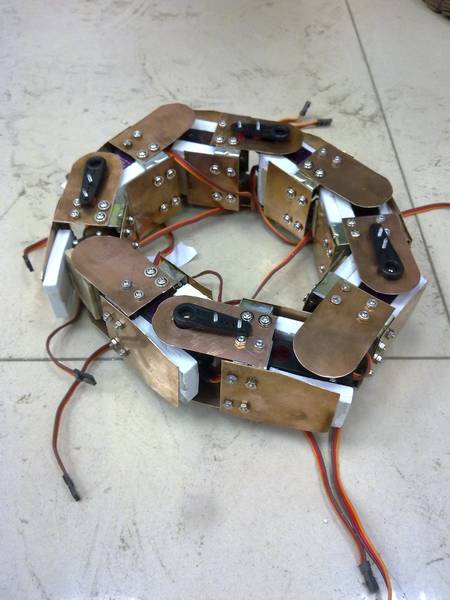
- 尺蠖,又名“弓背虫”,是一种柔软的无脊椎爬行动物。尺蠖的爬行动作因其特殊的身体结构而与众不同,它既不同于蛇依靠肌肉的左右摇摆前进,也不同于蚯蚓依靠肌肉的纵向收缩伸展来前进,它是通过独特的纵向弓背、延展来进行爬行。这种爬行与蛇和蚯蚓的运动形态相比,其最大优点是与爬行表面的接触面积小,尺蠖的头尾长有吸盘和触脚,通过吸盘和触脚的抓力,一曲一直运动,将身体与接触面的滑动摩擦力转化为静摩擦力,提高了爬行效率。同时,弓背-延伸的爬行方式,也更加适用于复杂的地形,如狭窄的管道、粗砺的地面、不规则的壕沟,不平坦的废墟等。这些都是比蛇和蚯蚓更具优势的运动方式。 目前国内外仿生蛇、仿生鱼等依靠肌肉左右摇摆获得前进动力的仿生机器人已经得到大量的充分的研究,但是在仿生尺蠖领域还比较薄弱,依靠弓背-延伸来爬行的运行状态模拟还有很多研究工作需要深入开展。本作品的创新点在于设计了一种仿生机械尺蠖,模拟弓背-延伸的独特爬行运动,设计了独特的爬行步态,可以适应复杂地形。在一些具有特殊地形(如狭窄的管道,壕沟,废墟)的路面上能体现出相当大的优势,经加载探测头和定位器后,可以承担侦查、探测、救援等工作。 该仿生机械尺蠖的设计方案,模拟尺蠖柔软狭长的身体构造,采用可编程模块化的关节状设计。机械尺蠖由8个相同的关节串联而成,我们用舵机模拟尺蠖的肌肉,每两个关节构成一个肌肉单元,每个肌肉单元具有纵向单方向的自由度。这样做的好处是:1、模拟了尺蠖柔软狭长的体态;2、可任意调整任意一个肌肉单元收缩舒张程度,方便对尺蠖独特的步态进行研究。整条尺蠖由单片机控制每个关节的弓背-延展动作,从而,机械尺蠖整体构成一个高冗余度的平面连杆机构,实现可编程的独特的尺蠖爬行动作模拟。 作品设计并制造了一台仿生度较高的机械尺蠖样机,并开展了机械尺蠖运动步态建模分析、数字仿真、实际样机运动步态测试工作。对三连杆波步态和多连杆波步态等对机械尺蠖运动速度的影响进行了仿真和实测数据比对,提出了优化措施。 本项目的创新点在于: 1、首次实现尺蠖独特的弓背延伸前行运动状态模拟;2、尺蠖可编程弓背的模块化关节结构设计;3、首次对机械尺蠖步态和前行速度关系进行研究。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 我们选择做此作品的原因有三: 1、尺蠖这种弓背——前身的运动方式有着其自身独特的优势。样机在爬行过程中将腹部与接触面的的滑动摩擦力转化为静摩擦力,提高了机械效率。另外这种运动方式还适用于各种复杂地形,便于越障。这些都是传统的蛇及蚯蚓爬行方式所不具备的优点。 2、尺蠖在爬行过程中背部肌肉拱起角度和爬行速度及稳定性的关系,目前尚未有人进行研究,我们尝试用舵机模拟尺蠖的肌肉,来找到最佳的爬行姿态。 3、目前市场上现有的仿生尺蠖机器人只有“隆昌国际机器人仿生尺蠖”和日本学习研究社的“仿生机械尺蠖”两种。而这两种机械尺蠖在形态上都与真实尺蠖柔软狭长的体态相差很大,仿生程度不高。可以说目前市场上尚未有一台高仿生程度的机械尺蠖。此项目必然有着广阔的研究和应用前景。 本作品创新点及关键技术有四: 1、首次实现尺蠖独特的弓背——前伸的动作模拟; 2、可编程模块化关节机构设计; 3、首次对尺蠖爬行过程中肌肉关节拱起角度和爬行速度稳定性的关系进行研究; 4、对机械尺蠖样机进行了建模分析和数字仿真及样机实测等工作。
科学性、先进性
- 设计了一种可重复模块化的机械结构,这种结构具有的优点有:加工装配统一,适应性强,支持级联拓展,鲁棒性高,方便拆卸运输等等。 对机械尺蠖的运动步态进行了数学建模分析分析,将机械尺蠖运动步态简化为平面连杆机构的运动,对三连杆波的步态和多连杆波的步态进行了详细的分析和对比,并在MATLAB下进行仿真,计算出了速度、位移等参数。通过数字仿真找到了机械尺蠖爬行过程中8个肌肉关节的最佳姿态角度。最后的实际样机运动测试取得了很好的效果,将仿真结果与实际运动测量结果进行了对比,提出了优化措施。
获奖情况及鉴定结果
- 2011年4月在北京航空航天大学举办的第21届“冯如杯大学生科技作品竞赛”中获得一等奖。
作品所处阶段
- 作品已经完成。目前正在进行后期完善。
技术转让方式
- 尚未进行技术转让。
作品可展示的形式
- 机械尺蠖样机可进行现场演示、相关项目技术论文及资料。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 目前市场上依靠弓背前伸获得前进动力的机械装置的研究几乎处于空白阶段。本作品的全新的运动方式必然会带来广阔的研究价值和广阔的市场应用前景。
同类课题研究水平概述
- 目前国内外仿生蛇、仿生鱼等依靠肌肉左右摇摆获得前进动力的仿生机器人已经得到大量的充分的研究,但是在仿生尺蠖领域还比较薄弱,依靠弓背-延伸来爬行的运行状态模拟还有很多研究工作需要深入开展。 目前市场上现有的仿生尺蠖机器人只有“隆昌国际机器人仿生尺蠖”和日本学习研究社的“仿生机械尺蠖”两种。而这两种机械尺蠖在形态上都与真实尺蠖柔软狭长的体态相差很大,仿生程度不高。可以说目前市场上尚未有一台高仿生程度的机械尺蠖。此项目必然有着广阔的研究和应用前景。








