














基本信息
- 项目名称:
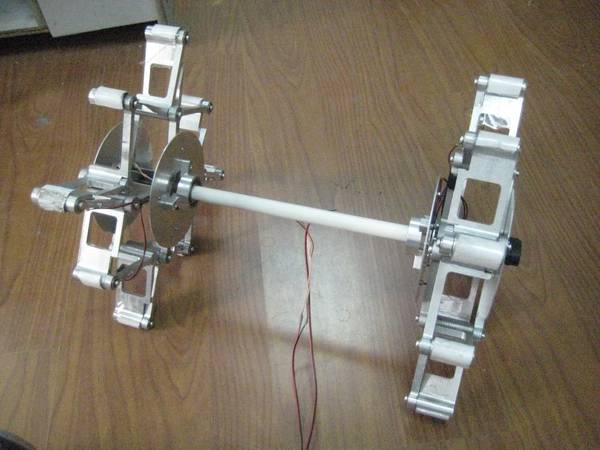
- 双雪花移动机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 双雪花机器人是通过改变自身形状,由重力作为向前翻转的动力源带动机构前进。电机起的作用是改变机构外形,该机构是多边形结构,通过电机的往复正反转可以改变机构重心位置,然后由重力做功向前翻转。这种设计概念非常适用于复杂地形的运动,此时克服自身重力比克服地形阻力要相对轻松一些。 在控制上,应用可以带动两个直流电机的L298N芯片来实现电机正反转的控制功能。
- 详细介绍:
- 1、多边形滚动雪花的概念 可移动多边形的思想源于几何形状与机械拓扑结构的相似性,利用熟知的几何图形,运用传统的机构学知识,实现连杆机构的新用途。可移动多边形是是综合几何图形特点和机构学知识,具有变形和移动能力的特殊机器人。 2、运动原理及过程 可移动多边形是具有规则的几何外形且能移动的单自由度连杆机构。机构由一个电机驱动,多边形顶点在各杆件约束下按不同顺序缩放,通过变形实现滚动。 机构初始位置时,几何外形是正八边形,电机正转一定角度,由于机构惯性力使得多边形向前翻滚,这样多边形每条边依次着地,实现移动。 目前已经设计并制作出四角雪花、六角雪花和八角雪花等一系列作品。滚动多边形系列具有很强的拓展性能,在满足机构运动链和几何参数的条件下,可以设计平面更复杂的多边形以及空间多面体连杆机构。 3、双雪花移动机器人的技术创新。 双雪花机器人是通过改变自身形状,由重力作为向前翻转的动力源带动机构前进。电机起的作用是改变机构外形,该机构是多边形结构,通过电机的往复正反转可以改变机构重心位置,然后由重力做功向前翻转。这种设计概念非常适用于复杂地形的运动,此时克服自身重力比克服地形阻力要相对轻松一些。 由于双雪花式移动机器人的前进是依托于电机的正反转实现的,在控制上,应用可以带动两个直流电机的L298N芯片来实现电机正反转的控制功能。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 1、设计目的。 结合几何拓扑学和传统机构学建立一种新型的移动机器人走行方式,为移动机器人的发展开辟新的研究道路。 2、基本思路。 (1)移动机构的建立 根据图形对称性和机构学的基本原理,设定其各边为相同曲杆;中心以两个相同杆相连,并错开一定角度,保证电机在正反转时实现机构的缩放效果。 双雪花移动机器人在其移动过程中要根据多边形形状的改变来保持重心的稳定,并要进行ZMP点的分析。 (2)双雪花移动机器人的尺寸和材料的选择 考虑到实验的条件和电机型号及功率的问题,合理选定机构尺寸。在选择制作机器人的材料时不宜选择密度过大的如铁等材料。 (3)建立双雪花移动机器人的数学和运动模型 (4)双雪花移动机器人机构的强度和稳定性校核 (5)双雪花移动机器人实体模型的制作 根据设计的尺寸以及运动学仿真和运动可行性的分析,绘制工程图纸,设计出一系列的加工工序。 (6)设计运动控制程序并对双雪花移动机器人进行控制和运动的调试 3、创新点。 根据运动链知识设计具有多边形外形的单自由度连杆机构的方法;利用多边形变形实现移动的原理。 另外机器人有一个有趣的功能:用一物块支撑一下将要落地的多边形顶点,则会改变其运动方向。 4、技术关键。 鉴于本机器人不同于一般的车轮和履带式机器人,在设计中间的机构时要充分考虑到两侧上下自由度和传递扭矩两方面的特点。 5、技术指标。 中间驱动电机的转速v,八角的设计尺寸,控制电路的设计。
科学性、先进性
- 1、作品的科学性。 双雪花机器人利用几何拓扑学和机构学的基本原理,分别由两个电机驱动几何外形来实现移动的单自由度连杆机构。使多边形顶点在各杆件约束下按不同顺序缩放,通过变形实现滚动。 初始位置时,几何外形是正八边形,电机正转一定角度,由于机构惯性力使得多边形向前翻滚,这样多边形每条边依次着地,实现移动。 2、作品的先进性。 目前存在的移动机器人类型主要有轮式、步行、履带式、蠕动、滚动及其他复合型机器人。 上述移动机器人,或是简单的将电机单向转动转换为平动,或是利用曲柄摇杆将转动转换为步进式移动。运动形式比较单一,运动原理比较简单。 而双雪花移动机器人是结合几何拓扑学与机构学,将机构变形与移动结合在一起,利用变形后机构重心前移实现机构的移动,开辟了一种新型的移动机器人发展道路。 3、参考文献。 [1].张毅.移动机器人技术及其应用[M].北京:电子工业出版社,2007. [2].徐国华,谭民.移动机器人的发展现状及趋势[J].机器人技术与应用,2001(3):1-14.
获奖情况及鉴定结果
- 北京交通大学2010-2011年度大学生创新性实验计划项目北京市级项目。
作品所处阶段
- 完成实物样机。
技术转让方式
- 成套设备引进和转让
作品可展示的形式
- 作品视频、实物现场展示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 1、使用说明:双雪花移动机器人属于一种新型的移动机器人机构,其外形为八边形,通过中间的驱动电机正反转带动机构变形,使其重心改变,在重力作用下,向前翻滚。 2、特点和优势:提出了一种新型的移动方式,以重力为前进的动力来源,驱动电机只是改变机构的外形,节省了能量的损耗。 3、适应范围:可实现太空探索,也可用于机械原理的课程教学。 4、推广前景技术性说明:不论是应用于太空探索,还是课堂教学,成本都不会太高,而且零部件加工要求低,适合批量生产。 5、市场分析:目前的机械领域教学,实体模型较少,而且授课形式单一,双雪花机器人作为课堂教学的工具不但可让学生进一步了解机构组成,而且有助于培养学生的创新能力。 6、经济效益预测:由于双雪花机器人的运动趣味性较高,有较大的市场应用前景,经济效益高。
同类课题研究水平概述
- 20世纪80年代,国外掀起智能机器人研究热潮。初期主要是从学术的角度去研究移动机器人的体系结构和信息处理能力,然后建立实验系统进行验证。足式机器人的相关研究获得飞跃式发展。20世纪90年代,借助先进技术和以往积累的基础,移动机器人逐渐在各个领域朝实用化发展。 步行机器人适应路面相对复杂的情况,因此近年其研究发展取得重大成果。美国NASA资助研制的八足行走机器人在斯珀火山火山口成功进行演示;美国NASA火星探测器于1997成功登上火星;Rocky7在火星Lavic湖的岩溶流和干枯的湖床上进行了成功的实验。 美国在多边形滚动机器人的研究和探索方面也取得了很多成就。在对移动机器人机构改装的基础上实现其移动和变形功能。图3所示为多边形移动机器人的移动方式。 球形滚动机器人是一类驱动系统位于球壳(或球体)内部,通过内驱动方式实现球体运动的机器人,具有良好的动态和静态平衡性,同时具有很好的密封性。北航机器人研究所研制了三种不同结构形式的、可安装视觉相机的球形移动机器人样机BHQ-1、BHQ-2、BHQ-3,进行了爬坡能力、越障能力及转弯的测试实验,完成了基于无线回传图像的环境观察遥控试验。 目前没有类似的课题研究,现有的走行机器人有轮式、履带式、腿式机器人等,他们的走行原理与雪花机构不同,雪花机构是利用其重心进行翻转,控制电机的正反转使其运动,开辟了一种新型的机器人移动方式。 在控制单个雪花机构的运行上较为成功的基础上,将两个雪花机构进行连接组合以实现其类似于车轮的转向,在单个雪花机构基础上进行创新与改进,以实现其更多的功能。








