














基本信息
- 项目名称:
- 几何精灵
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- “几何精灵”的思想源于几何形状与机械拓扑结构的相似性,根据熟知的几何图形变形特点,运用传统的机构学知识,实现连杆机构的新用途。“几何精灵”是综合几何图形特点和机构学知识,具有变形和移动能力的特殊机器人。移动可分为步行、滚动、滑行。特点是采用闭链机构,结构简单,易于实现。“几何精灵”在教育教学、产品开发和军事航天等领域也有着广泛的应用前景。
- 详细介绍:
- 1.滑行四边形精灵 原理:曲柄作用下,两足会相对地面左右摇摆,使得两侧摩擦力差值交替变化,摩擦力较小的一侧相对地面会有较大的位移,如此交替变化实现类似轮滑的滑行移动。 特点:单自由度机构,通过单动力驱动,依靠两侧摩擦力差值的交替变化实现一种滑行的移动方式。 2.步行(双侧足)四边形精灵 原理:改变足部机构,使得机构可以单足支撑,在曲柄作用下实现迈步动作,如此循环实现空间一维的运动。 特点:单自由度机构,通过单动力驱动,依靠两侧足的交替支撑实现一种步行移动方式。 3.步行(内外足)四边形精灵 原理:两个曲柄共同作用可以使内足在空间运动,与外足轮流支撑,并在奇异位置处改变电机转向,使机构有四个运动方向。 特点:二自由度机构,实现一种步行移动方式,内外足轮流支撑,通过控制电机转向,可实现多个方向上的运动。 4.滚动四边形精灵 原理:电机转动使得四边形转动形状变化,其重心发生偏移出底边,并在惯性作用下使四边形翻滚,完成四边形机器人的一个翻滚步态。 特点:单动力机构,改变四边形形状使重心偏移出与地面接触的边,使其翻滚,继续运动四个杆轮流着地,实现四边形的滚动运动。 5.步行三角形精灵 原理:三自由度六杆机构,改变边长,使得其中一个足离地并向前跨出一步后着地,同样可以使另外一只足离地跟进一步,实现一维的运动。 特点:通过控制伸缩杆长度,利用三角形的变形,两足轮流支撑,实现步行移动。 6.滚动三角形精灵 原理:改变三角形其中一条边长,使三角形重心移动偏出与地面接触的底边,从而使三角形机器人翻滚,然后侧边再缩短恢复原长,完成一个步态。如此反复完成三角形机器人的直线滚动。 特点:三自由度机构,螺旋传动改变三角形边长,使得重心偏移,三边轮流支撑,实现滚动。
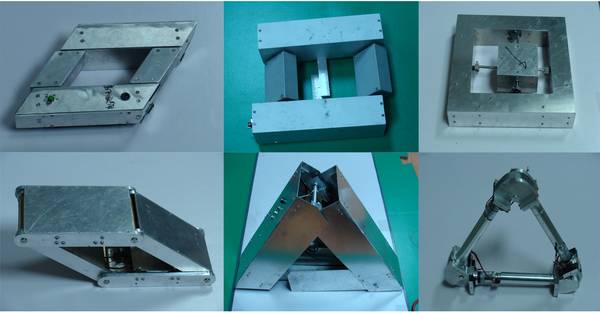
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 设计目的: 结合几何图形变形的特点,研究在移动方式上,连杆机构的新应用。 设计基本思路: 分析几何形体的变形特征,运用机构学知识与无线控制技术,设计一系列精灵,展示滑行、步行和滚动三类特殊移动方式。 创新点: 1.提出“几何精灵”的思想,即“几何精灵”是综合几何图形特点和机构学知识,具有变形和移动能力的特殊机器人。 2.分析封闭几何图形变形的特点,设计巧妙的机械结构,实现了连杆机构的滑行、步行和滚动三类特殊移动。 技术关键: 分析几何图形变形与机构移动方式的相似性,设计相应的连杆机构,满足滑行、步行、滚动特殊移动方式的要求。 主要技术指标: 1.实现6类几何精灵的滑行、步行和滚动3种特殊移动。即四边形精灵滑行、四边形精灵(双侧足)步行、四边形精灵(内外足)步行、四边形精灵滚动、三角形精灵步行、三角形精灵滚动。 2.建立无线控制平台,实现1台PC机对6类几何精灵的无线通信。
科学性、先进性
- 作品科学性、先进性: 1.设计理念的新颖性:提出“几何精灵”的思想,分析几何图形的变形,提出新型的可移动连杆机构。国内外研究与此思想相近只有NASA的机器人,以四面体为单元,组建空间复杂多面体,实现空间运动。我们的研究则从最基础的几何图形开始,如三角形、四边形等,探寻其中的可移动原理,然后逐渐向空间拓展。 2.机构上的创新:本研究所涉及的都是闭链连杆机构,并进行机构创新,实现特定的运动。同样的几何形状,改变关键结构实现不同的移动方式。 3.家族化的设计:各个精灵贯穿同一设计理念,采用多种移动方式,构成“几何精灵”大家族。 总之,“几何精灵”在运动原理、机构原理和应用领域的拓展空间巨大,具有较高的科学性和先进性。
获奖情况及鉴定结果
- 2009年“挑战杯”科技发明制作A类校级一等奖 2009年“挑战杯”科技发明制作A类市级一等奖
作品所处阶段
- 实验室阶段
技术转让方式
- 专利转让/技术入股
作品可展示的形式
- ■实物、产品 ■模型 ■现场演示 ■图片 ■录像 ■样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点及优势: 1.“几何精灵”是一个原创性的思想,它是一系列具有变形、移动功能的几何体。 2.熟知的几何图形,运用机构学知识,设计整体闭链机构,实现连杆机构滑行、步行、滚动的特殊移动方式,机构简单,易于实现。 3.几何图形和连杆机构都具有很深的拓扑性,还有很多奇特的精灵等待着开发。 应用前景: 1、在教育方面: 机构学教育:几何图形学与机构学知识相结合,将变形和移动功能综合起来,创造特殊的可移动连杆机构,丰富机构学的内容,提高学生对机构的理解。 中小学教育:建立教育平台,以变形移动的几何体为基础,与几何知识密切结合,融合机械、电子、计算机等多学科知识,使静止、枯燥的几何图形活动起来,增强学生对学习的兴趣,在娱乐中获取知识。2、在产品开发方面:开发移动玩具产品,并借助于先进的控制方式,实现精灵间的互相通信,最终建立几何精灵的家族。 3、在军事、航天方面:可以和其他传统移动机构相结合,研发新型的地面特种移动作战机器人、航天星球探测机器人。
同类课题研究水平概述
- 研究概况: 1轮式机器人 人类史上最成功的移动机构便是轮式机构,各种各样的民用车辆全都是属于轮式机构,但是轮式的越障性能较差,在崎岖地面的行走性能很差,因此大大制约了轮式移动机器人的发展。 2履带式机器人 履带式机器人的研究也比较早,作为最常见的移动方式之一,已广泛应用车辆中。相对于轮式机器人来说,履带的优点在于越障性能好,但是相对的移动、转向不灵活,总体比较笨重。 3 步行机器人 步行机器人越障能力比较强,具有较强的地面使用能力,在崎岖路面上,步行车辆优于轮式或履带式车辆。步式机器人运动靠腿足系统。步行运动是最灵活也是适应能力最强的一种运动方式,并与仿生学结合在一起,已成为机器人家族中重要的一份子。 4 滚动机器人 滚动机器人的移动方式不同于轮式的滚动,其中以球形机器人为代表。球形滚动机器人是一种以球形或近似球形为外壳的独立运动体,是近几年才出现的一种新的机器人机构形式。它的运动方式以滚动运动为主。由于这种运动方式和外壳的特殊性,这种球形机器人用最少的自由度,以欠驱动的方式实现了全方位运动。比其他运动方式转向灵活;并且当运动机构发生坠落等危险情况时,可以迅速的调整运行状态,进行连 5 蠕动机器人 蠕动机器人是仿照蛇和蚯蚓的结构特点和运动机理,它由多个相同的关节构成,各节有独立的驱动系统。蠕动机器人是利用模块单元之间的相对转动,或者单元之间的缩放使身体弯曲伸张实现运动。 6 NASA多面体机器人 NASA机器人研究所,根据多面体的变形特点,提出了一种由球副和移动副组成的复合机构,通过整体的变形实现滚动移动。








