














基本信息
- 项目名称:
- 基于ARM9嵌入式系统的多终端智能移动机器人系统的设计
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
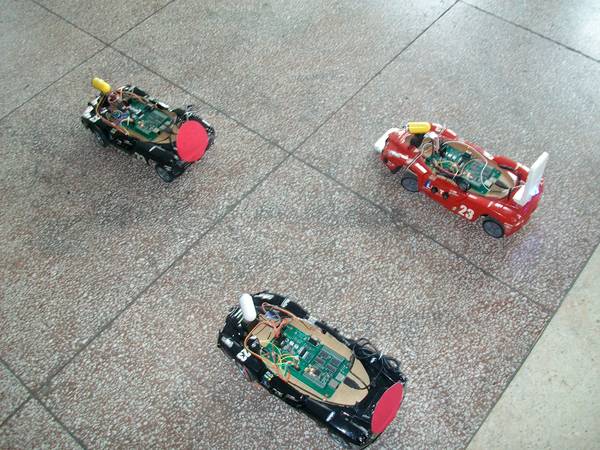
- 移动机器人研究是机器人学中的一个重要分支。多移动机器人协调技术又是移动机器人研究的一个重要方向。随着科技的发展,多移动机器人系统的协调问题已成为一个新兴的研究热点,本项目将针对多机器人编队控制技术进行实践性探索,将对目前原有的理论成果进行验证,并开拓创新,提高技术水平。 本项目是以自主研发的基于ARM920T嵌入式系统的智能机器人为平台,加入传感网络系统,无线传输系统,图像采集处理系统等辅助系统,利用无线传输技术,舵机编队导航技术,视频处理技术,多机系统控制等先进技术来使智能移动机器人达到保持队型运动,队形变换,自动检测,追踪定位,躲避障碍等高端技术要求。
- 详细介绍:
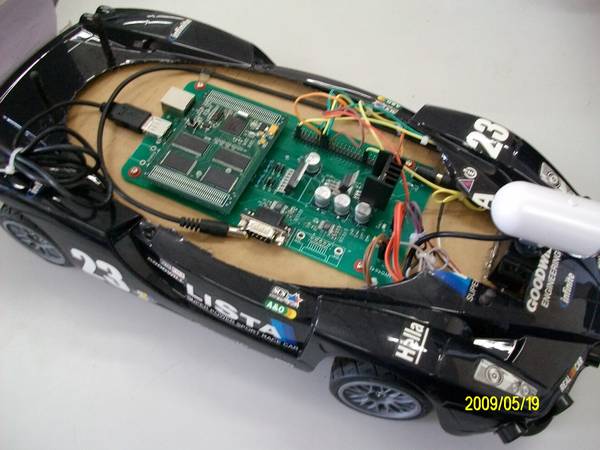
- 本项目的研究目标是,利用自主开发的全体移动机器人编队控制算法来实现多移动机器人的协调控制,这不仅仅是移动机器人研究领域的重要研究方向,也是多机控制领域的又一重要突破。本项目将对原有的理论成果进行有效地验证,并且进行开拓创新,提高编队的精度。 本项目的研究基本平台是自主研发的基于ARM920T嵌入式系统的智能机器人研究平台,本平台是又运动车体与控制电路板组成,运动车体为VH-32电动车,控制电路为自主设计的基于ARM920T嵌入式系统的控制设备。本项目采用系统模块化设计,将本控制系统划分为11个模块,分别是运动执行机构模块、舵机模块、电源模块、CPU模块、Jtag及复位模块、Nandflash模块、Norflash存储模块、 SDRAM模块、串口模块、USB接口模块、网卡驱动模块。将超声传感器模块、摄像头模块加入平台构成13模块编队控制平台,本项目通过对各个模块的驱动程序与应用程序的编写,来实现对单台移动机器人的控制,通过编队控制算法与视频采集处理分析技术与无线传输技术来实现多台机器人的编队控制,从而实现群体机器人系统的保持队型运动,队形变换,自动检测,追踪定位,躲避障碍的技术指标。 本项目是多领域的交叉项目,在基本研究平台搭建中,涉及到了机器人的机械设计,力学研究,动力学研究,受力研究,电路设计研究,PCB板设计等多领域,在程序开发部分,涉及到了程序设计,算法开发,驱动编写,应用编写等多方面知识,在视频处理方面同样涉及到了许多方面的知识,包括图像的采集技术,图像的分析处理技术,图像的分析技术等关键技术。
作品图片



作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 一、设计思路和技术关键: 本课题是在智能移动机器人的基础上开展的,在智能机器人的平台上加入多传感器,无线传输模块,以实现多终端机器人系统编队运动、自动跟踪、避障的技术要求。 项目分为三部分开发: 1.硬件平台:在此部分以ARM920T芯片为核心,搭建其外围电路系统,再连接电源模块(包括电源输入,变压模块等)、电机动力系统、舵机控制系统等,来实现对小车(终端移动机器人)的控制。 2.软件程序:是基于Linux的操作系统,通过TC进行对ARM920T芯片内驱动层程序和应用层程序的编写,来实现ARM920T芯片对电源模块,舵机控制模块,传感器模块及视频采集模块的驱动,和对终端的编队控制。 3.图像采集模块:大体由三个部分构成,第一部分为摄像头的选取和Linux驱动的实现,第二部分为摄像头采集格式为JPEG的照片,第三部分为对JPEG图片进行处理并提取有用信息进而传递给其他模块。 二、创新点 群体机器人系统、编队算法。 三、主要技术指标: 单体自主避障,主动追踪。群体编队行走,编队避障。 单体指标:总长380mm;总宽190mm;轴距260mm;轮距172mm;车轮直径66*27mm;齿轮比6:2:1;重量2500g;最快行进速度2.5m/s编队行进速度0.2m/s;最大转角65度 群体指标:群体个数3、4、5;编队形状直线型,三角形,菱形,正方形;形成队伍时间>5s;保持队型时间<20min;编队运动偏差5%。
科学性、先进性
- 一、群体机器人系统的优越性 1.相互协调的n个机器人系统的能力可以远大于一个单机器人系统的n倍,通过共享资源弥补单机器人能力的不足,完成单机器人系统无法完成的复杂任务。 2.设计和制造多个简单机器人比复杂机器人更易、成本更低。 3.使用群体机器人系统可以大大节约时间提高效率。 4.群体机器人系统的平行性和冗余性可以提高系统的柔性和鲁棒性等等。 二、编队控制算法的优越性 1.充分获取当前环境信息。单个机器人的传感器获取信息的能力是有限的,如果多个机器人保持一定的队形,而每个机器人的传感器负责获取自己周围的环境信息,这样就可以保证比较完整地获得机器人群体当前活动区域的环境信息 2.可以提高工作效率,如果选择的队形适当,可以加快任务的完成。例如,多个机器人推箱子,机器人与箱子之间必须保持一定的几何关系才能够将箱子推向期望的方向,类似的任务还有农作物收割、播种等。
获奖情况及鉴定结果
- 2009年4月,本校大学生课外学术科技作品竞赛一等奖。
作品所处阶段
- 中试阶段。
技术转让方式
- 无。
作品可展示的形式
- 实物、产品、现场演示。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本项目是对无线群体机器人编队控制系统的研究,核心板已经拷入驱动程序与编队应用程序的,只需要开启几台终端机器人,小车即终端系统就会自主运行,完成自动追踪与避障,群体编队运动,来完成单体机器人所无法完成的任务。终端机器人之间采用Zigbee无线传输技术相联系,运用视频采集识别系统来定位追踪。所以本项目是不需要人为控制,系统会自动运行,完成指定任务,实现全自动多体协同任务。该项目的适用范围非常广发,可以作为大型自动搬运机器人,也可作为小型管道机器人,以及完成侦查检测等任务,此类课题的发展目标是实现多体卫星协同监测,提高卫星的监测精度。所以发展前景非常广阔,不仅仅可以应用于日常生活,也可应用与工业生产、运输,也可应用于空间卫星定位。现在群体机器人系统已经成为了机器人领域的前沿热门课题,本项目将无线传输技术,与群体机器人编队相结合,发展前景极为广阔。
同类课题研究水平概述
- 随着社会生产技术的飞速发展,机器人的应用领域不断扩展。从自动化生产线到海洋资源的探索,乃至太空作业等领域,机器人可谓是无处不在。 国外起步较早,经过二十几年的发展,群体机器人系统的研究己在理论和实践方面取得很大的进展,己出现了多机器人仿真系统和实验系统。欧盟专门设立了一个进行多机器人系统研究的MARTHA课题一“用于搬运的多自主机器人系统(multiple autonomous robots system for transport and handing application )”。日本对群体机器人系统的研究开展得比较早,著名的研究有ACTRESS系统和CEBOT系统。ACTRESS系统是由日本H.asmaa等人提出的通过设计底层的通讯结构,把机器人与周边设备和计算机等连接起来的自治多机器人智能系统,这个系统的主要特点是系统的单个动作和合作动作的并存。日本名古屋大学的Fukuda教授提出的CEBOT系统,每个机器人可以自主地运动,没有全局的模型,整个系统没有集中控制,可以根据任务和环境动态重构、可以具有学习和适应的群体智能,具有分布式的体系结构。美国学者KJin和GBnei等研究了SWARM系统。SWARM系统是由大量自治机器人组成的分布式系统,其主要特点是机器人本身被认为无智能,它们在组成系统后,将表现出群体的智能。 我国已开发出在车辆拥挤时自行移动的全方位移动结构机器人,还开发了使用带有桶型自由辊的车轮,用3个传动装置驱动可自由地前后左右移动或旋转。相对于国外,我国对于群体机器人的研究起步较晚,目前已逐渐引起人们的重视,上海交通大学,中国科学院,哈尔滨工业大学机器人研究所,东北大学等已先后开发出各种形式的群体机器人系统。








