














基本信息
- 项目名称:
- 可伸缩叶轮式爬楼机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 可伸缩叶轮式爬楼机器人是基于车辆-地面力学理论,借助单片机控制,具有动力源,采用蜗轮蜗杆减速电机驱动,安全可靠。圆轮-叶轮变换机构根据行星轮系中行星轮轨迹多样性,采用弧形杆与行星小齿轮固结,实现圆弧杆的收缩。通过控制行星轮系中太阳轮与行星架的转差,实现圆弧杆收缩程度可调,使机器人可以在一定范围尺寸变化的不同楼梯上爬行。 可伸缩叶轮式爬楼机器人作为一个无障碍平稳移动平台,其载重...(查看更多)
- 详细介绍:
- 可伸缩叶轮式爬楼机器人是基于车辆-地面力学理论,借助单片机控制,具有动力源,采用蜗轮蜗杆减速电机驱动,安全可靠。圆轮-叶轮变换机构根据行星轮系中行星轮轨迹多样性,采用弧形杆与行星小齿轮固结,实现圆弧杆的收缩。通过控制行星轮系中太阳轮与行星架的转差,实现圆弧杆收缩程度可调,使机器人可以在一定范围尺寸变化的不同楼梯上爬行。 可伸缩叶轮式爬楼机器人作为一个无障碍平稳移动平台,其载重...(查看更多)
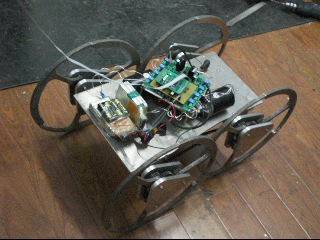
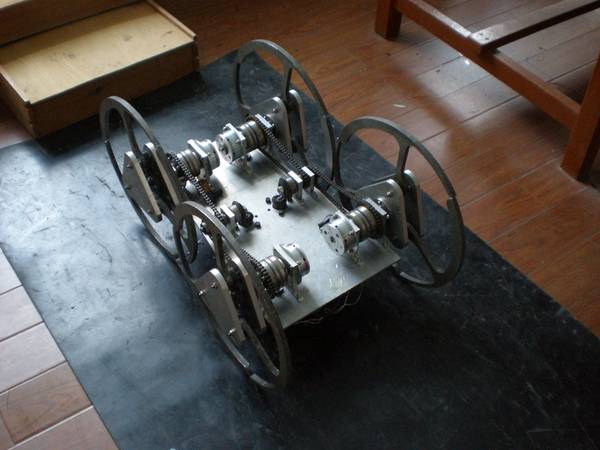
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的: 研发一种通过轮形变换(圆轮-叶轮)来达到既能平稳、连续爬楼梯作业又能平稳走平地,且可普遍适应国家标准楼梯的可伸缩叶轮式爬楼机器人。 创新点: 1.可平稳连续爬楼; 2.实现爬楼动作与走平地的自如转换; 3.实现了在一定范围尺寸变化的不同楼梯上爬行。 技术关键: 1.其轮心轨迹逼近直线,实现平稳连续爬楼作业; 2.基于行星轮机构实现轮形变换(圆轮-叶轮); 本...(查看更多)
科学性、先进性
- 可伸缩叶轮式爬楼机器人特点: 相对于履带爬楼轮椅,可伸缩叶轮式爬楼机器人通过行星轮机构实现轮形变换(圆轮-叶轮),使爬楼机在楼梯与平地接合处自如转换;通过控制行星轮系中太阳轮与行星架转差实现了在一定范围尺寸变化的不同楼梯上爬行;相对于iBOT3000,可伸缩叶轮式爬楼机器人运用叶轮爬楼,实现平稳连续作业,运行轨迹逼近直线,且成本低廉。可以用于爬楼梯轮椅,上下楼搬运,楼梯清扫等楼梯间作业。
获奖情况及鉴定结果
- 2009年5月在校第十五届“五四杯”课外科技作品竞赛中获一等奖
作品所处阶段
- 中试阶段
技术转让方式
- 专利转让
作品可展示的形式
- 实物,图纸,现场演示,图片,录像,样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 可伸缩叶轮式爬楼机器人具有动力源,采用蜗轮蜗杆减速电机驱动,安全可靠。圆轮-叶轮变换机构根据行星轮系中行星轮轨迹多样性,采用弧形杆与行星小齿轮固结,实现圆弧杆的收缩。通过控制行星轮系中太阳轮与行星架的转差,实现圆弧杆收缩程度可以调节,使机器人可以在一定范围尺寸变化的不同楼梯上爬行。 本科技作品是基于链传动,齿轮传动,行星轮机构的综合移动平台,相对于以往发明成果来讲: 结构简单...(查看更多)
同类课题研究水平概述
- 目前国外研制的相关成果: iBOT3000是目前星型轮机构爬楼机中性能指标最高的产品,它的结构非常紧凑,而且运动灵活,操作简便。 iBOT3000是基于星型轮机构的助残轮椅,它采用了比普通爬楼机复杂的驱动结构,目前,iBOT已获得FDA批准在欧美上市,售价与中高档轿车相当,且受星型轮爬楼机构的限制,轮心轨迹起伏相对较大。 国内的研究现状: 一、星型轮爬楼机 目前国内有多种...(查看更多)








