














基本信息
- 项目名称:
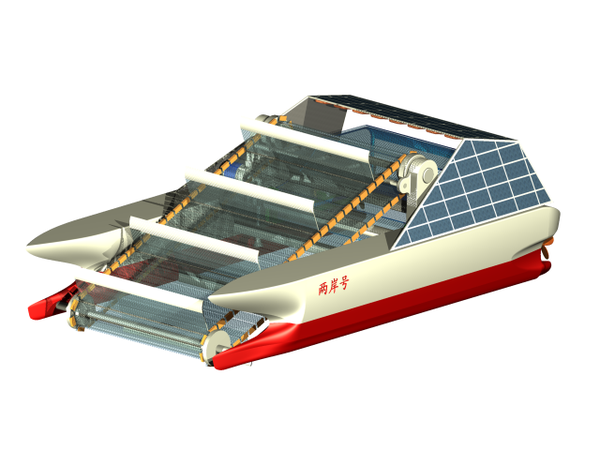
- 水上垃圾清理机器人——“两岸号”
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 该设计针对性地解决了景区封闭水域,以及不适合现有大型垃圾船工作的水面(如小型水库、港口等)垃圾清理问题。主体选用兴波阻力小、水上面积大的双体船结构,“两岸号”也由此得名。全机采用电力驱动,太阳能电池辅助供电,环保节能。无线电遥控操纵可实现简便高效的清理工作,配套起吊、运输皮卡车,可以流动作业。整体造型简洁美观,将改变人们对环保机械比较肮脏简陋的传统观念。本机产品化后,可以取代目前的人工打捞,填补市场空白。
- 详细介绍:
- 该作品的设计目的在于针对性地解决景区小面积水域,以及不适合现有大型垃圾收集船工作的水面(如小型水库、港区等)垃圾清理问题。取代以往在这些水域使用的人工打捞方式。通过小型化设计和遥控操纵实现简便高效的清理工作。以抗风浪能力强的小水线面双体船作为载体,电机驱动传送网带,网带上的勾臂可以确实有效地打捞漂浮垃圾,再经过喷水系统的冲刷,垃圾落入收集箱。为使船上有限的空间能够得到最充...(查看更多)
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:取代目前费时费力的人工打捞方式,解决旅游、休闲景区封闭水域,以及不适合现有大型垃圾船工作的水面(如小型水库、港口等)垃圾清理问题。 基本思路: 1.无线电遥控,工作范围广; 2.电力驱动,辅以太阳能电池板,节能环保低噪音; 3.阻力小、上层面积大的船体结构,较大的空间和较高的航行效率。 创新点: 1.遥控操纵的电力水面垃圾清理机器人的...(查看更多)
科学性、先进性
- 科学性: 船体选择现今在船舶设计领域较为先进的小水线面双体船型,可以在提供相同浮力的情况下获得更大上层空间,且宽度比单体船大得多,其稳定性明显优于单体船,同时具有承受较大风浪的能力,还具有良好的操纵性,还具有阻力峰不明显、装载量大等特点。 打捞装置使用网状传送网带与网状勾臂,可以打捞绝大部分种类的水面垃圾,打捞过程中就可以过滤水份,减少船载质量,从而减少航行阻力。...(查看更多)
获奖情况及鉴定结果
- 2009年6月,获“挑战杯”省级大学生课外学术科技作品竞赛特等奖。
作品所处阶段
- 中试阶段
技术转让方式
作品可展示的形式
- 图片 现场演示 模型
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该作品适用于景区小面积水域以及不适合现有大型垃圾收集船工作的水面(如小型水库、港区等)垃圾清理问题。可打捞大部分水面漂浮垃圾,如树叶、包装物等。基于无线电遥控技术,操控简单,机动性好,十分适用于公园或景区小面积水域内水面垃圾的清理工作。 我们会针对不同的工作面积和垃圾量,根据客户的要求定制不同尺寸的清理机器人。 使用时只需利用一辆经简易改装的皮卡车将其运送...(查看更多)
同类课题研究水平概述
- 当前国内外并没有针对封闭以及小水域水面垃圾清理问题做出产品设计。 多数国家所开发出的垃圾清理船,定位于江,河、湖、海等大面积水域的垃圾清理,大多是在传统船舶基础上加设一套垃圾收集装置,船体体积大,排水量大,内燃机驱动,有人驾驶,机动性不佳。以下例举两例典型的垃圾清理船。 苏州造船厂建造的400kN内河打捞工程船,为单底、单甲板、尾机型工程船舶;该船调遣...(查看更多)








