














基本信息
- 项目名称:
- 螃蟹机械手
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
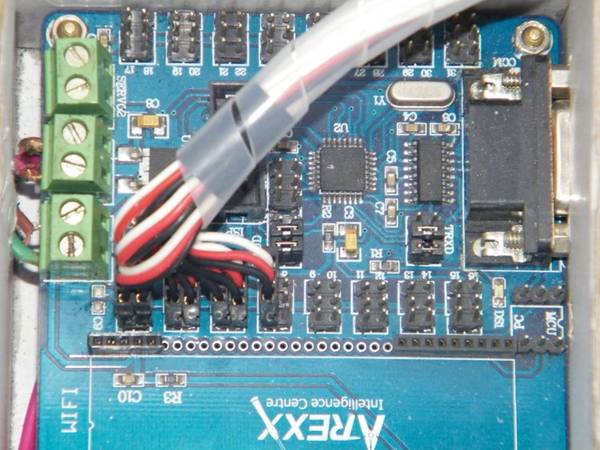
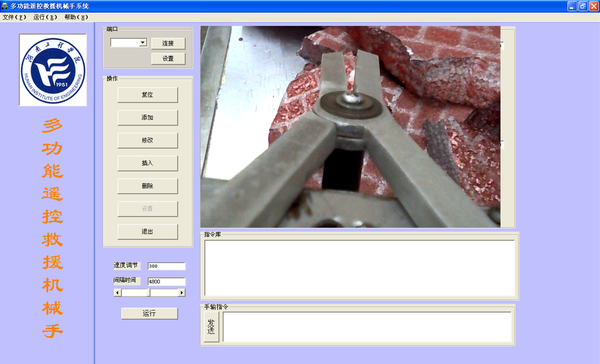
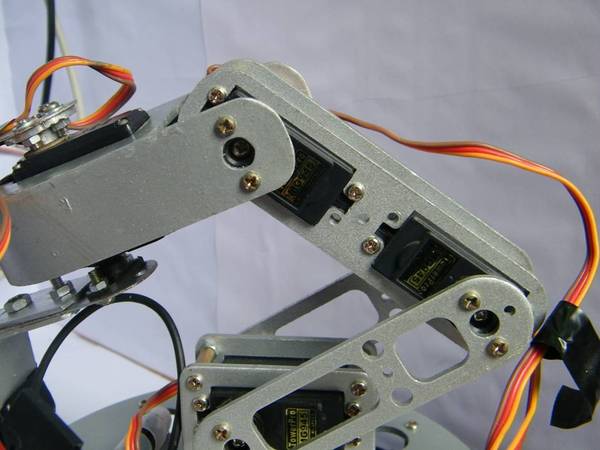
- 本作品以7自由度类人机械臂和多功能仿生螃蟹执行端为核心,采用atmega168单片机进行控制,运用人体工程学手柄和高清摄像头相结合的操作平台进行操作,实现了7自由度机械手的平稳运行,仿生执行端准确的定位,远距离实时交互的完成剪断,扩张,夹取等动作。
- 详细介绍:
- 该机械手臂有7自由度,比一般机械手运动灵活,活动范围要大,可完成更复杂的工作并且此系统通过接收手柄发出的指令并转化成相应的信号发送给控制板中的单片机实现人机分离,更加适合太空海洋等特殊环境下的操作,以保证操控人员安全,更为难得的是其动力由载体提供,执行端部可以按需要进行更换,从而实现太空维修,矿石采集,切断、扩张、夹取、实时监控等操作,真正做到“一机多用”,同时也能辅助完成一些特殊的很难进行人工操作的救援任务,例如:狭小空间内的救援操作;需要大功率的切断、扩张的救援情况;高空救援作业等。这些都填补了现在没有类似救援装置的空白,该作品执行端安装有摄像头,还可实行可视操作,更加增强了操作的准确性和操控人员的安全性,其执行端按仿生学设计,可夹持更重物体
作品图片

作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的: 设计拥有多关节多个执行端的机械手,能灵活快速安全有效的完成宇宙海洋开发的任务,比如太空站外维修,采集矿石样本,海底勘探。同时也可应用于救援。 基本思路: 机械手臂部分仿生人类手臂关节运动,具有多自由度构造,使用符合人体工程学手柄控制,执行端利用摄像头监测,实现可视化操作,从而达到人机分离的目的,执行端部位仿生螃蟹等生物,灵活的来完成指定动作 创新点: (1)7自由度构造的仿生机械手工作活动范围广、精度高、可完成更复杂动作 (2)采用手柄操作,其符合人机工程学设计,相对键盘、按键操作要灵活快捷舒适并且操作简单不易出错 (3)在执行端设置监控摄像头,增强操作的准确性并且实现人机交互实时控制,提高远程操作能力。(4)设计了多功能仿生执行端,并有统一规格的接口,更加方便快捷的实现切断、扩张、夹取等操作,实现“一机多能”。 技术关键: 执行端的能精确定位并按照指定命令完成指定动作并且能承受一定的压力;可视化操作,实现人机互动。 主要技术指标: 电机参数:尺寸:40.7*19.7*42.9mm 重量:55g 扭矩:10.5kg/cm(4.8V),13kg/cm(6V) 速度:0.20sec/60degree(4.8v)0.17sec/60 degree(6.0v) 额定工作电压:4.8-7.2V 转动角度:0到220度 最大伸展臂长(含执行端):45厘米
科学性、先进性
- 该机械手臂有7自由度,运动更灵活,活动范围更大,可完成更复杂的工作;且此系统通过手柄操作,实现人机分离,更加适合太空海洋等特殊环境下的操作;执行端部可以按需要进行更换,实现切断、扩张、夹取等操作,做到“一机多用”;同时也能辅助完成一些特殊的很难进行人工操作的救援任务,填补了现在没有类似救援装置的空白;该作品执行端安装有摄像头,实行可视操作,增强了操作的准确性和操控人员的安全性。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 专利形式
作品可展示的形式
- 实物,图片,视频
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特点:通过单片机和电脑远程遥控多关节机械手臂,人机交换,实施太空海洋等特殊环境下的维修,采集任务以及救援任务。 优势:本作品采用atmega168单片机进行控制,可以对电机进行精确地控制,保证机械手准确的定位并能够平稳的运行;同时可以运用手柄进行操作,扩大了操作人员的观察和操作范围;7个关节的机械手可以灵活的运动,以适应各种复杂操控环境;机械手前端的摄像头可以实时的反馈内部的环境信息,更好的协作操作人员完成各种复杂的工作。 推广前景:人工的操作局限性日益凸显,本发明可替代人类操作,前景广阔。 应用范围:1.宇宙的开发2.海洋的开发3.灾害的援救4.自动化生产 市场分析:目前市面上机械手比较单一,少有远程同步可视操作,更少有通过符合人体工程力学设计的手柄控制,灵活,快捷,安全,舒适却又能进行复杂环境的操作。该产品很好的填补了这一空缺。 而且我们还有快速更换的执行端,可实现‘一机多能’,价格便宜,操作简单,市场乐观。
同类课题研究水平概述
- 目前国外此种研究已经兴起,国内尚属罕见








