














基本信息
- 项目名称:
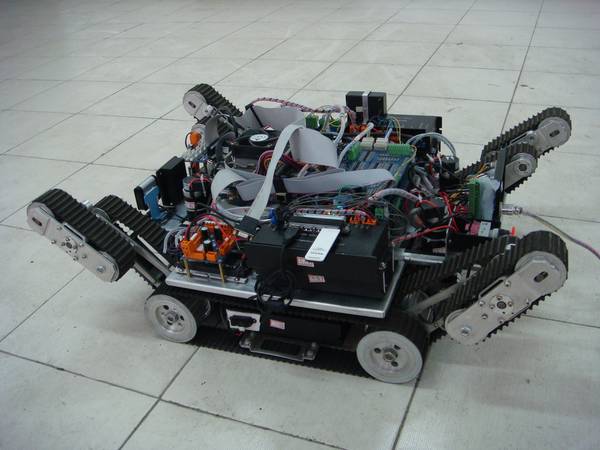
- 智能关节履带式安保机器人
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 移动机器人移动平台的设计与运动控制技术的研究是整个移动机器人系统研究的两大重要组成部分,它将为移动机器人更高层次的理论与方法研究提供一个可靠的实验平台及基础。开发研究以工业、国防及服务业等领域为应用背景的,且易于用户二次开发的移动机器人平台具有很好的市场潜力和研究意义。 本课题结合现有机器人结构形式的优点,创新性的提出一种机器人行走机构形式,设计了一种新型的关节履带加履带足的复合式机器人行走机构,改变了原有关节履带机器人的越障原理和越障方法,显著改善了现有关节履带机器人的越障机动性和自主性,提高了机器人的越障性能;机器人四条摆腿采用独立驱动,实现机器人机体的自主姿态调整功能,能够更好的适应各种复杂的地形环境,完成特定的工作。 并且对移动机器人系统进行了相关实验,实验结果证明了机器人的硬件系统和软件系统的有效性,同时验证了移动机器人的各项运行指标达到任务指标,结合实验结果提出了进一步的改进方案。
- 详细介绍:
- 本作品研制的智能关节履带式安保机器人将自主变位履带结构应用到关节履带机器人上,设计了一种新型的关节履带加自主变位履带足的复合移动机构,改变了关节履带机器人的越障原理和越障方法。即改变了现有关节履带越障过程中需要人为调节其摆腿角度才能越障的缺陷,通过利用连接在摆腿上的履带足能越过比轮子直径大几倍的障碍物,实现机器人自主越障,通过样机实验,该机器人越障能力与相似尺寸的关节履带机构的越障能力相比可提高二至三倍,其次在自身控制系统、传感器系统以及机构系统的相互配合下,通过执行相应控制策略机器人能够在一定范围内实现自主水平姿态调整功能,给搭载在机体上的设备提供更加平稳的工作平台,使其更具适应各种未知复杂环境的能力。 采用类似4个独立驱动摆腿的并联机构的原理来达到车身的动态平稳性以及姿态自动调整。这样当机器人车身发生倾斜的时候,通过控制摆腿的空间位置达到调整机器人机体水平姿态的目的。作为独具创新特色的履带足结构,其履带足可绕回转轴自由摆动,当履带足碰到障碍物时,壁面对履带足的摩擦力使它产生一个向上翻转的力矩,履带足沿壁攀升,随着姿态的调整腿部同步带以及连接前后旋转臂的履带在接触到物体时也会产生附着力,无需人工干预,即可自主攀越障碍,从而极大地提高了机器人越障机动性。
作品图片




作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本作品研制的机器人针对现有关节履带机器人需要多次调节其摆腿角度才能越障的缺陷,发明了一种新型的关节履带加履带足的复合移动机构能。 其基本思路是在关节履带机器人各摆腿头端加装一套自主变位履带足,改变了关节履带机器人的越障原理和越障方法,从而显著改善了现有关节履带机器人的越障机动性和自主性。本作品的创新点是机器人四条摆腿采用独立驱动,实现机器人机体的自主水平姿态调整功能,使其更具适应各种复杂的地形环境。并联机构的设计控制也成为本作品的关键技术。 本课题设计的全自主越障侦测机器人的技术参数如下:机体重30Kg,最大载重10Kg,最大行驶速度为15m/min,最大坡度为40°,越障高度220mm,跨越壕沟宽度可达435mm。尺寸为550mm×550mm×300mm(长×宽×高),摆臂长度185mm,履带足轮径40mm。并对其进行功能扩展: 1)通过执行相应控制策略机器人能够实现自主水平姿态调整功能,给搭载在机体上的设备提供更加平稳的工作平台。2)通过机体前后的声纳传感器,两侧的PSD红外传感器,机器人能够实现全方位的避障功能。3)机器人通过带云台高清晰变焦摄像头,使机器人具备远距离监控侦察能力。4)机器人采用远程无线遥控,对于一些具有危险性的工作,可对人员安全起到重大的保护作用。5)机器人通过姿态控制调整可以完成四种越障姿态:初始姿态、爬坡姿态、过沟姿态、双履带姿态,使之适应复杂地形环境。
科学性、先进性
- 本作品研制的机器人将自主变位履带结构应用到关节履带机器人上,设计了一种新型的关节履带加自主变位履带足的复合移动机构,改变了现有关节履带越障过程中需要人为调节其摆腿角度才能越障的缺陷,通过利用连接在摆腿上的履带足能越过比轮子直径大几倍的障碍物,实现机器人自主越障,通过样机实验,该机器人越障能力与相似尺寸的关节履带机构的越障能力相比可提高二至三倍,其次在自身控制系统、传感器系统以及机构系统的相互配合下,通过执行相应控制策略机器人能够在一定范围内实现自主水平姿态调整功能,给搭载在机体上的设备提供更加平稳的工作平台。 采用类似4个独立驱动摆腿的并联机构的原理来达到车身的动态平稳性以及姿态自动调整。作为独具创新特色的履带足结构,其履带足可绕回转轴自由摆动,当履带足碰到障碍物时,壁面对履带足的摩擦力使它产生一个向上翻转的力矩,履带足沿壁攀升,随着姿态的调整腿部同步带以及连接前后旋转臂的履带在接触到物体时也会产生附着力,无需人工干预,即可自主攀越障碍,从而极大地提高了机器人越障机动性。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 专利转让
作品可展示的形式
- 实物、产品模型、现场演示、图片、录像、样品
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 本作品研制的机器人将自主变位履带结构应用到关节履带机器人上,设计了一种新型的关节履带加自主变位履带足的复合移动机构。首先实现机器人自主越障。其次通过执行相应控制策略机器人能够在一定范围内实现自主水平姿态调整功能。 关节履带机器人是一个较为成熟并得到应用的机器人,在此基础上进行创新设计的机器人,可用于野外工程作业机器人、探险机器人、军事机器人、服务机器人等,其应用前景广阔,具有良好的社会效益和经济效益。 目前我国正处于经济体制和社会转型的特殊历史时期。我国犯罪活动不断升级,排险机器人是公安干警在排爆和消防、消除毒气污染和反恐排险过程中减少自身伤亡有效打击暴力犯罪,保护人体的技术含量高的装备。随着国际恐怖暴力活动的猖獗,排险机器人在国际市场需求强烈,潜力巨大。 就市场预测看,全国30个省市平均5个以上的中等城市,每个城市配备一套需150套,生产排险机器人每台售50万元,产值7500万元,按40%利税算是3000万元。保守计算每省一套,共计30套的产值为1500万元,利税600万元。
同类课题研究水平概述
- 目前,移动机器人由于其优越的机动性和灵活性而备受亲睐,并在许多场合投入实际应用,面临着复杂、未知、多变的非结构环境,为了确保任务执行的可靠性和机器人的安全性,移动机器人在机构设计上研究的主要方向是:跨越壕沟和攀越台阶的能力,克服倾翻的能力、行驶的高速高效性、陷入松软地面后能实现自动脱离且恢复正常行驶的能力。 国外目前在关节履带移动机器人方面的技术水平已经比较成熟,应用非常广泛,主要用于地面反恐防爆,军事侦察等方面。美国REMOTEC公司早期研制的ANDROS-F6A移动机器人是一种小型化的关节履带轮式机器人,它最显著的特点是它具有更快的速度更优异的越障性能以便操作人员能够更高效地执行任务。美国美国NASA喷射推进实验室,iRobot公司,卡内基•梅隆大学机器人学院和南加州大学机器人研究实验室共同合作Urbie(市区)机器人是一种能以视觉导引并能自动爬坡的前置关节履带移动机器人,其前摆腿可360度异步旋转。 国内目前相关研究大多处于跟踪研究阶段,自主创新的研究并不多见。由北京中泰科技发展有限公司和上海交大联合研制的Super-D II型排爆机器人是典型的关节式履带结构,其行走装置采用四轮驱动和双摆驱动,该机器人最大伸展长度1.8米,其行走速度每分钟0-40米,爬坡能力40度,能在1.3米的范围内原地回转。该机器人其技术在国产排爆机器人中处于领先地位。 中国科学院沈阳自动化研究所自行研制的、具有自主知识产权的“灵晰-B”型排爆机器人,为三段履带式设计,是典型的关节式履带机器人,身上装置行走、机械手、云台三个摄像头,最大行走速度30米/秒,能抓取15公斤重物,爬行45度斜坡和楼梯,并能钻洞,越过40厘米高障碍和50厘米宽壕沟,排爆人员可在远距离以有缆及无缆操作方式对机器人进行精确操控。这台机器人同时还可以选装爆炸物销毁器,在对可疑物爆炸装置确认后,可对爆炸装置进行迅速销毁。 通过比较国内外关节履带机器人,发现其越障能力和对地形的适应能力有了提高,但是目前关节履带移动机器人普遍存在如下缺陷:自主性差即越障过程中需要根据现有环境人为调节其摆腿角度进行越障;车身多数不具备自主水平调节的功能,越障平稳性很难保证,容易产生车体倾斜甚至倾覆,因此机器人能够在一定范围内实现自主水平姿态调整功能,将会使其更好地完成周边环境侦察任务,从而使其更具适应各种未知复杂环境的能力。








