














基本信息
- 项目名称:
- 用于湖泊蓝藻水华预警监测的智能巡航器
- 来源:
- 第十一届“挑战杯”国赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品在考虑蓝藻暴发诱因的基础上,综合机械电子、自动化控制、模式识别、GIS和GPS技术等多学科知识,设计出能在水面自主巡航进行水质监测的机器人。它可以在水面上自主智能巡航,通过加载多种水质监测仪器对蓝藻水华的影响因子进行实时监测,从而可在蓝藻大规模暴发前提供预警信息,使政府决策部门有充足时间去采用多种有效手段抑制藻类生长,最终实现控制蓝藻水华暴发的目的。 本作品技术特色为:1)运用无人智能监测巡航器可全天候、全湖域的实时监测诱发蓝藻水华的影响因子,从而可大大节省用于蓝藻预警监测的人力和物力;2)巡航器导航定位采用两级分层方式,可实现湖泊全水域巡航遍历、实时避障、多巡航器编队路径协调等功能。
- 详细介绍:
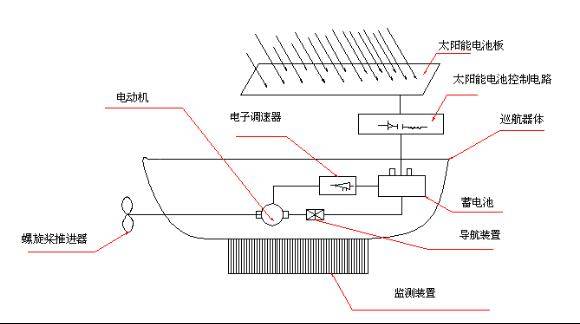
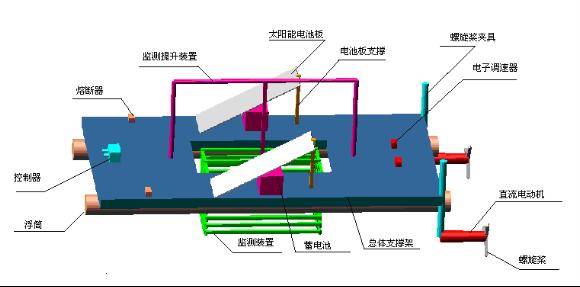
- 由于湖泊的水质检测是一项非常辛苦的常规性工作,耗费大量的人力物力,如果能开发出一种智能型的无人监测平台就显得非常具有实际意义。 基于此,本作品综合机械电子、自动化控制、模式识别、GIS和GPS技术等多学科知识,设计出能在水面自主巡航进行水质监测的机器人。它可以在水面上自主智能巡航,通过加载多种水质监测仪器对蓝藻水华的影响因子进行实时监测,并对监测数据进行汇总筛选统计。从而形成一个有效的、运行成本低的、投资经济效率高的蓝藻水华预警监测系统。 该巡航器的机械系统采用模块化设计方法,同时具有开放性接口,能够与多种传感器兼容,便于系统升级。智能巡航器结构上采用双体船式结构,螺旋桨推进器组件左右对称布置,由太阳能电池组件和蓄电池为平台提供能源。 巡航器机械部分由螺旋桨驱动子系统、监测取样子系统组成。螺旋桨驱动子系统使用两路全桥驱动芯片LMD18200,分别驱动两台直流微型电机旋转带动电子调速器,从而控制螺旋桨的转速。监测取样子系统主要由:电动机、蜗轮蜗杆减速器、卷筒、水泵、钢丝绳等组成。它一方面提升监测探头,另一方面当需要抽取水样时起到取样的作用。 巡航器控制部分采用两级分层控制方法。顶层用于导航、路径规划和数据汇总筛选,底层用于避障和运动控制。顶层选用微型工控机作为上位机,它为巡航器提供了强大的计算能力,用来处理运算比较复杂的路径规划算法和数据统计工作;同时,利用GPS模块对巡航器进行导航;利用无线通讯模块将统计好的数据传输至监测中心。底层选择PIC16C57单片机,主要用于运动控制、开关量传感器的信息读取实现避障的简单路径算法。控制部分的顶层和底层之间通过串口进行通信,串行通信采用RS—232工作方式。
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
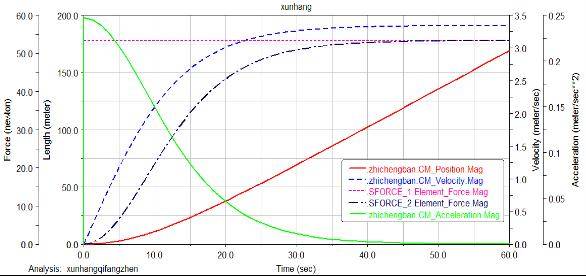
- 1、目的:蓝藻水华是一种称为“蓝细菌”的光合自养生物,对人类生存环境构成重大威胁。如果能够在蓝藻水华暴发前对水质进行监测,提供预警信息,及早发现和抑制蓝藻生长,就能有效地控制蓝藻水华暴发。而湖泊的水质检测又耗费大量的人力物力,因此开发一种智能型的无人监测平台具有很强的实际意义。本作品设计能在水面自主巡航进行水质监测的机器人,可在水面上自主智能巡航,通过加载多种水质监测仪器对蓝藻水华的影响因子进行实时监测,并对监测数据进行汇总筛选统计,从而可在蓝藻大规模暴发前提供预警信息。 2、思路:自主设计智能巡航器的机械系统模块和智能控制模块,由太阳能电池组件和蓄电池提供能源,实现无人自主巡航,完成避障、路径规划、环境遍历和多机器协同监测等任务。从而形成一个有效的、运行成本低的蓝藻水华预警监测系统。 3、创新点:1)突破常规监测手段受到人员和资金限制的缺点,运用无人智能监测平台全天候、全湖域实时监测诱发蓝藻水华的影响因子,从而为湖泊蓝藻水华提供预警信息;2)综合机械电子、自动化控制、模式识别、GIS和GPS技术等多学科知识设计的智能巡航器可实现无人自主巡航,完成避障、路径规划、全水域环境遍历和多机器协同监测等任务。 4、技术关键:巡航器的动力性能和抗风浪的稳定性能;巡航器的避障、路径规划、环境遍历等自主控制性能。 5、技术指标:巡航器巡航速度和加速度、转弯半径、续航能力、抗风浪稳定指标;太阳能蓄能效率指标;巡航器巡航路径精度指标;多巡航器协同监测的效率指标。
科学性、先进性
- 1、本作品针对湖泊蓝藻暴发问题,成功研制了用于蓝藻水华预警监测的智能巡航器。要控制蓝藻水华暴发,关键是要在搞清楚蓝藻水华暴发的基本条件后,对其进行实时监测。本作品在考虑蓝藻水华暴发诱因的基础上,利用智能无人巡航器对湖泊中诱发蓝藻水华的影响因子进行实时监测。它与常规水文、水质监测相比,具有监测的污染因子明确、监测频次高、持续时间长、监测面积大、监测响应快速等特点。目前从所见报道分析,国内外对水面无人智能监测平台尚未进行系统的研究。 2、本作品具有自主巡航的智能性,系统控制软件为自主开发研制。巡航器导航定位采用两级分层方式。顶层是利用GIS技术建立湖泊数字环境地图,实现湖泊空间数据库集成与入库,通过接收GPS模块得到的巡航器经纬度位置数据,在数字环境地图上对巡航器进行实时导航,从而实现巡航器在湖泊中的自主定位与路径规划。底层集成融合多传感器信息,完成对动态障碍物的避障任务。针对水域面积大的湖泊,还可实现多巡航器协同湖泊水环境监测。
获奖情况及鉴定结果
- 2009年5月,荣获校第七届大学生课外学术科技作品竞赛特等奖; 2009年6月,团省委、省教育厅、省科协、省学联,获省大学生课外学术科技作品竞赛一等奖。
作品所处阶段
- 物理样机中试阶段
技术转让方式
- 专利技术转让
作品可展示的形式
- 样机、图片、视频录像、现场展示
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 技术特色为:1)运用无人智能监测巡航器可全天候、全湖域的实时监测诱发蓝藻水华的影响因子,从而可大大的节省用于蓝藻预警监测的人力和物力;2)巡航器导航定位采用两级分层方式,可实现湖泊全水域巡航遍历、实时避障、多巡航器编队路径协调等功能。 据了解,国内目前大约有66%以上的湖泊、水库处于富营养化的状况。其中,重富营养化和超富营养化的占到22%以上,而这一趋势仍在加剧。河湖水的富营养化,造成的一个突出问题就是引发蓝藻水华的暴发。研究表明,大规模的河湖蓝藻水华暴发,将造成饮用水源污染,河湖生态遭到严重破坏,水资源的利用效率降低,以及巨大的经济损失,同时,蓝藻毒素将影响公众的健康生活,造成水环境安全隐患。本作品可实现对蓝藻暴发诱发因子进行实时监测,为预防蓝藻水华暴发提供可靠决策依据,可广泛应用于城市和农村湖泊,具有广阔的应用前景,社会效益、经济效益和环境效益显著。
同类课题研究水平概述
- 通过对维普、期刊网、万方、中国专利信息网等数据库的检索,与蓝藻(水质)监测预警或智能巡航器相关的文献报导共10篇(见查新报告),其中: 1、“用于蓝藻监测及蓝藻水华预警的浮标”是一篇专利文献报道,其中提到了该发明可以放置在湖泊、水库或者水源地,对水体中不同位置、不同深度的有效辐射光强、温度、溶解氧、蓝藻生物量和总藻类生物量进行监测,并实现数据的实时传输。但该文没有涉及将智能巡航器作为自主巡航监测蓝藻水华暴发预警平台的内容。 2、“巡逻机器鱼”也是一篇专利文献报道,该机器鱼采用了GPS卫星定位系统,但其应用领域是出海执行巡逻任务,而不是进行蓝藻水质监测任务。 3、“用于河水净化的太阳能生化巡航船”是一篇关于利用生物膜组件网箱生化治理河塘、湖泊水体的太阳能生化巡航船的专利报道,没有涉及用于蓝藻水质监测。其发明人是本作品的指导教师。 4、“赤潮生物的监测仪器”涉及到赤潮浮游生物的识别检测系统与快速定量技术。没有涉及具有进行蓝藻水华监测或预警的巡航器的相关内容。 5、“水质自动监测系统关键技术及集成设备研制”项目研制了10种水质自动监测仪,开发了水质监测管理软件系统,研制成的水质自动监测集成系统可对12项水质重要指标进行连续监测,实现了全系统的自动化控制、信息管理、数据采集、远程传输等,建立了数据共享平台和水污染事件分级通报系统。该成果没有涉及进行蓝藻水华监测或预警的巡航器相关内容。 6、“智能化水质测定仪”提到了该仪器可用于带色的或有微量悬浮质点的溶液和环境水样的测定;另外一篇文献“Google Earth和ArcGIS9.2软件在太湖水污染及蓝藻监测数据展现中的应用”中提到了利用上述软件对太湖水污染及蓝藻监测数据进行集成和发布。这两篇文章都没有涉及到将智能巡航器作为监测平台的内容。 7、“SPC-3 UUV仿生机器鱼及其长航时实验”只是报道了机器鱼的一个航行试验。另外一篇文献“仿生机器鱼的设计及其运动控制研究”也只是对机器鱼研制方面进行了探讨。这两篇报道都未提到机器鱼在蓝藻或水质监测上的应用。 8、“仿生机器鱼是怎么监测水质的”一文中谈到如何利用机器鱼搭载多参数水质监测仪进行即时分析水样,然后再把信息无线发送给船上电脑技术。但文中没有提到该机器鱼可以自主巡航,完成避障、路径规划、全水域环境遍历和多机器协同监测等任务。








