














基本信息
- 项目名称:
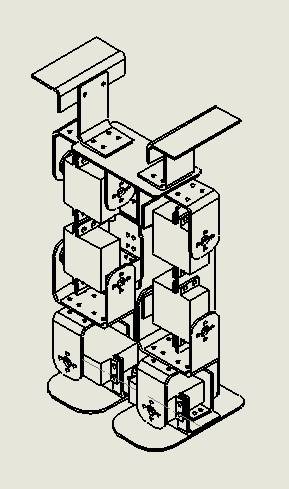
- 双足行走机器人
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本作品仿照人关节而作。
- 详细介绍:
- 本作品根据中国机器人大赛双足竞走项目相关要求而制作,采用铝合金作为结构本体。利用舵机驱动,使得整机重量在1Kg以内, 该机器人能实现行走、向前翻筋斗,向后翻筋斗等动作。
作品图片
作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本作品根据中国机器人大赛双足竞走项目相关要求而制作,采用铝合金作为结构本体。利用舵机驱动,使得整机重量在1Kg以内, 该机器人能实现行走、向前翻筋斗,向后翻筋斗等动作。
科学性、先进性
- 本作品根据中国机器人大赛双足竞走项目相关要求而制作,采用铝合金作为结构本体。利用舵机驱动,使得整机重量在1Kg以内, 该机器人能实现行走、向前翻筋斗,向后翻筋斗等动作。
获奖情况及鉴定结果
- 无
作品所处阶段
- 实验室阶段
技术转让方式
- 无
作品可展示的形式
- 实物
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 双足步行机器人对行走环境要求很低,适应各种地面具有较好的越障能力,节约能量具有更高的灵活性和独特的优势。 1、为残疾人士(下肢瘫痪或截肢者)提供室内和户外行走工具。 2、极限环境下代替人工作业。如太空星球探索,海底勘探,水下资源开发和设备维修、沉船寻找和协助打捞,以及核电站的监事和维护作业。 3、在教育、艺术和大众服务行业有着广阔的应用前景。如娱乐机器人、康复机器人等。
同类课题研究水平概述
- 在2010年中国机器人大赛双足竞走项目交叉足印竞步机器人组中,冠军是中国矿业大学徐海学院徐海1队,亚军是西北农林科技大学农林卫士队,季军是中国地质大学(北京)信息工程学院Superman队。








