














基本信息
- 项目名称:
- 车辆运行状态数据可导出的模拟驾驶器开发
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作B类
- 简介:
- 针对现有教学型模拟驾驶器和开发型模拟驾驶器研究的缺点,本文构建一套车辆运行状态数据可导出的模拟驾驶系统,为研究“人- 车-路”闭环系统的特性提供数据来源;为基于车辆状态数据的驾驶员行为分析研究提供实验平台。
- 详细介绍:
- 虚拟现实技术作为当代科学技术的一个崭新领域,以其生动逼真的效果和极具潜力的发展前景正日益显示出其旺盛的生命力。本文以桌面虚拟现实技术为基础,针对传统开发型模拟驾驶器成本高、教学型模拟驾驶器不能导出车辆运行状态数据的缺点,开发了一套低成本车辆运行状态数据可导出的模拟驾驶系统,为研究“人-车-路”闭环系统的特性提供数据来源,同时为基于车辆状态数据的驾驶员行为分析研究提供实验平台。 在构建车辆运行状态数据可导出的模拟驾驶系统时采取了如下步骤:首先,利用汽车操纵动力学相关知识对八自由度的整车动力学模型进行程序实现。其次,运用三维建模软件实现了汽车三维模型的建立;运用光照模型、纹理映射等技术实现了虚拟汽车模型的真实感表达。第三,运用分形理论和DEM模型建立了道路及周边环境的三维模型。第四,运用优先绘制技术、外部引用等场景显示优化技术,解决了场景模型显示的流畅性问题。第五,实现虚拟车辆运行状态数据的记录显示模块。最终实现了一套低成本的车辆运行状态数据可导出的模拟驾驶系统,为研究人车路闭环驾驶系统的特性、驾驶员操作动力学行为、车辆专业相关实验教学、道路设计与驾驶安全等课题,提供了必不可少的仿真运行环境及车辆运行状态数据支撑,对相关领域的理论研究和实际应用均有重要意义。
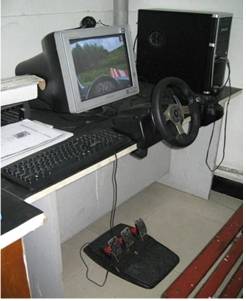
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 目的:构建一套车辆运行状态数据可导出的模拟驾驶系统。 基本思路:利用汽车操纵动力学的相关知识对八自由度的整车汽车模型进行程序实现;运用三维建模软件、光照模型、纹理映射技术、分形理论和DEM模型、优先绘制技术、外部引用等场景显示优化技术,实现一套低成本的车辆运行状态数据可导出的模拟驾驶系统。 创新点: ① 针对传统开发型模拟驾驶器成本高,开发了一套低成本车辆运行状态数据可导出的模拟驾驶系统; ② 采用外部引用优化绘制等技术,进而降低了实现该系统的成本; ③ 该系统采用8自由度车辆模型模拟汽车的动力学特性,使模拟驾驶系统更加符合车辆动力学特性,使得利用其导出的数据进行人-车-路闭环驾驶特性的研究更加可靠。 技术关键: ① 三维车辆模型与车辆动力学模型的关联显示技术; ② 基于多尺度的外部引用优化绘制技术的程序实现; ③ 车辆、道路及周边环境模型真实感处理技术实现。 主要技术指标: ① 能够选择不同的虚拟车型、虚拟道路进行模拟驾驶实验; ② 能够导出虚拟驾驶实验中车辆的运行状态数据; ③ 导出的车辆运行状态数据符合车辆动力学特性。
科学性、先进性
- 现有的虚拟驾驶系统主要有开发型虚拟驾驶系统和教学型虚拟驾驶系统。开发型虚拟驾驶系统:它从整体性出发,对车辆安全性能进行仿真研究和开发的大型试验设备,虽然在运行过程中它也可以采集到车辆运行状态的各种参数,但如果把它用于对驾驶员行为和心理的研究,成本巨大,难以进行大量的驾驶员模拟驾驶,不适合研究出其中进行大量的并行试验;教学型虚拟驾驶系统:该系统虽然价格适中,且可以进行仿真驾驶训练,但是不可以导出车辆运行过程中的数据。我们结合现有虚拟驾驶系统的优点,进行全新的设计,使新系统不仅可以用于虚拟驾驶,还可以导出车辆运行状态数据,并且投资较小,同时满足现有汽车相关研究的需求。
获奖情况及鉴定结果
- 该作品在西安科技大学挑战杯作品的评比活动中获得了各位评委老师的一致好评,同意推荐。
作品所处阶段
- 实验生产阶段
技术转让方式
- 转让
作品可展示的形式
- 实物、产品、现场演示、图片、录像
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 该系统的开发完全遵守现有模拟驾驶器的使用规范,其技术特点是能够导出车辆运行状态数据,优势是整个系统成本低廉,适用于人车路闭环驾驶系统特性的研究,特别是涉及以车辆行驶状态数据为对象研究行驾驶员行为的场合。因该类型研究需要大量虚拟驾驶实验,开发型模拟驾驶器和教学型模拟驾驶器均不具备这个优势。 该系统可以作为车辆工程专业学生学习车辆动力学相关课程的实验平台;同时可以作为“人-车-路”闭环驾驶安全性评测的实验平台,还可以做汽车动力学仿真,对道路的设计对和驾驶员行为引起的人车路安全性评价提供依据。由于该系统可以广泛应用于教学及生产实际,同时可以为交通部门判定交通事故提供数据来源,因而其市场前景极其广阔,可以产生巨大的经济效益。
同类课题研究水平概述
- 现有的虚拟驾驶系统主要有开发型虚拟驾驶系统和教学型虚拟驾驶系统。开发型虚拟驾驶系统:它主要是利用计算机,在电子、液压技术控制下,从整体性出发,对车辆安全性能进行仿真研究和开发的大型试验设备。 该方面的研究有:1993年,美国交通部(DOT)招标建立美国的大型驾驶模拟器,IOWA大学中标。1991年日本马自达公司兴建了跑车型开发性驾驶模拟器,1995年日本汽车研究所(JARI)也建成了带有立体感模拟系统的驾驶模拟器。吉林大学建设的具有6自由度运动系统的开发型车辆驾驶模拟器,其规模和性能居世界先进水平。但是开发性模拟驾驶器价格贵,成本以千万元计,主要用于研究车辆的控制系统,性能改进等,重点立足于车辆研发领域,用其研究人车路闭环系统特性,尤其是研究驾驶员行为而引起的闭环系统动力学改变,因需要大量的试验,而导致试验成本过高,不适合进行此类研究。根本上是因成本因素限制了其应用推广。而且研究人车路闭环驾驶的特性也不需要完全模拟车辆的细节特性,只有符合基本汽车动力学模型,符合驾驶实际就能够满足此类研究的需要。 总之,开发型模拟驾驶器虽然在运行过程中它也可以采集到车辆运行状态的各种参数,但如果把它用于对驾驶员行为和心理的研究,成本巨大,难以进行大量的驾驶员模拟驾驶,不适合研究初期中进行大量的并行试验。 教学型模拟器是对开发型模拟器的一个简化版本,它能够使得使初学者快速掌握驾驶理论知识和基本操作技能,使学员的驾驶座舱既可以独立使用,也可以通过数据通信单元与电脑控制中心配合使用。座舱单独使用时,可以实现汽车驾驶教学与训练功能,与电脑控制中心配合使用时,整个系统可以实现由汽车驾驶教学与考试、驾驶训练与考核、无纸化考试、学员档案管理与打印等功能。 但是教学型模拟驾驶器的侧重点是视景模拟,即设置与再现道路交通景观,构成与实际道路逼真或相似的交通信息。这些信息包括自身车辆、其他车辆、行人、道路与路旁景致、各种交通设施的视觉信息。对车辆动力学的模拟放在了次要的地位,而且在模拟驾驶过程中其虚拟车型运行状态数据不可导出。教学型模拟驾驶器的上述缺陷,影响其应用推广,尤其不能用于研究驾驶员行为而导致的车辆行驶状态改变方面的课题。








