














基本信息
- 项目名称:
- 多功能救援探测车
- 来源:
- 第十二届“挑战杯”省赛作品
- 小类:
- 机械与控制
- 大类:
- 科技发明制作A类
- 简介:
- 本设计旨在增加救援探测车野外越障能力,实现无障碍探测、救援。例如狭小隧道中材料的采集,泥泞、冰雪环境下物品的运输,地震废墟中伤员的援救等。
- 详细介绍:
- 本作品主要针对野外恶劣的环境而制作,在不同环境可作出不同的反应,救援探测车除履带行走方式外,还兼有螺旋轮、机械臂等越障方式。多样的行走方式增加了其对环境的适应能力,不仅能够在平缓地面行走,而且在陡峭的斜坡、雪泥地表面、软沙地表面360度方向自由行驶。以适应冰面、沼泽、软沙地及雪地等多情况复杂路面,为科学研究提供稳定可靠的平台。
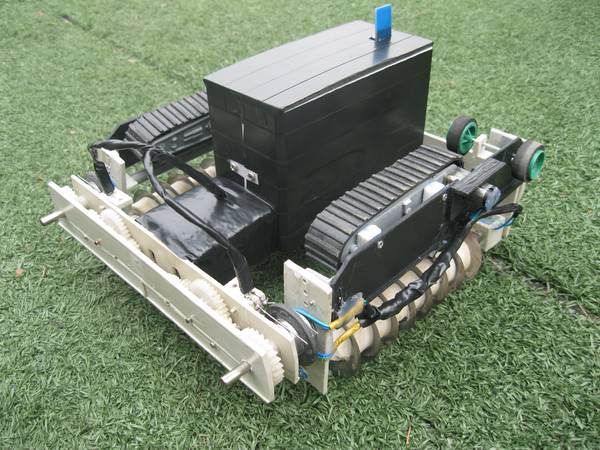
作品图片


作品专业信息
设计、发明的目的和基本思路、创新点、技术关键和主要技术指标
- 本设计旨在增加救援探测车野外越障能力,其最初思路来自于自攻螺丝,不同行走方式交替使用,360°全方向自由行驶。行走方式所在平面与变速齿轮组垂直布局,牢固、稳定、灵活,并以可重复充电的锂电池为动力,节能、环保、无污染、体积小、能源利用率高,符合绿色新理念。电路控制部分采用无线数传模块进行控制,2.4GHz工作频段,2Mbps高速率数据传输,GFSK调制,抗干扰能力强,电压驱动低,便于软件编程。同时可与网络建立连接,做到远距离控制,实现真正的无人化。 关键技术指标如下: 1.机械部分: 螺旋叶片外半径: 18mm 螺旋叶片内半径 5.9mm 叶片成形节点距离: 15mm 齿轮啮合顶隙: 0.4mm 履带行驶方式下最大倾斜角 44.3° 履带行驶方式下最大倾斜角: 61.4° 电动机最大扭矩: 1.0kg 翻转架最大扭矩: 3.5kg 翻转架摆动最大角度误差: 5.73° 2.电路驱动部分: 工作电压: 6V-26V 工作电流: 300mA 3.电路无线遥控部分: 工作频率: 2.4GHz 工作电压: 3V-5V
科学性、先进性
- 本设计创新性地采用了螺旋式前进方式,在质地软的沙地等特殊表面可以转换为横向行驶是其标新立异之处,本设计主要涉及:无线遥控技术、机械制造、单片机控制、环境分析、电路转换等。在大多数地段都能够行走是其最大优势,多功能救援探测车除具有普通探测机器人所具有的行走方式外,还兼有螺旋轮、机械臂等运动模式。多样的行走方式增加了其对环境的适应能力,使其不仅能够在平缓地面行走,而且在陡峭的斜坡、雪泥地表面、软沙地表面自由行驶。
获奖情况及鉴定结果
- 1.2010年12月在安徽师范大学第四届“挑战杯”大学生课外学术作品竞赛中获一等奖; 2.2010年12月在安徽师范大学第三届学生专利发明大赛中获一等奖; 3.2010年11月在安徽师范大学物电学院第五届“创新杯”学生科技作品制作大赛中获特等奖。 4.2011年5月在第四届“挑战杯”合锻股份安徽省大学生课外学术科技作品竞赛中获二等奖。
作品所处阶段
- 实验室
技术转让方式
- 无
作品可展示的形式
- 作品展示形式有:模型 、磁盘 、现场演示 、图片、 录像。
使用说明,技术特点和优势,适应范围,推广前景的技术性说明,市场分析,经济效益预测
- 目前在市场上形如多功能救援探测车的行走工具还没出现,它的出现会给人类提供更多的便利条件,本作品有很好的发展方向——艰险地段救援和科学探测;凭借其强大的力度,为艰险地段救援提供便利的运输工具,同时可在多功能救援探测车上安装各种传感探测设备,以获得在各种不同环境中的探测数据,为科学研究提供确实可靠信息。
同类课题研究水平概述
- 目前,国内外研究机械类机器人主要在硬件平台和软件控制两大技术领域,工作环境改变,适宜环境的硬件平台也对应的发生改变;国内外常见的机器人有:建筑机器人、水下探测机器人、管道检修机器人、工业机器人、空间机器人等,在不同环境下,由硬件的电路部分做出相应的分析,并通过传感器将信号反馈到软件的控制部分,进而产生回应,再控制硬件平台的动作;由上可见,制约机器人活动范围的主要原因是硬件平台。 以上分析可知:国内外的机器人只能在特定范围活动,结构单一,适用范围窄。本作品主要针对野外恶劣的环境而制作,在不同环境可作出不同的反应,救援探测车除履带行走方式外,还兼有螺旋轮、机械臂等越障方式。多样的行走方式增加了其对环境的适应能力,不仅能够在平缓地面行走,而且在陡峭的斜坡、雪泥地表面、软沙地表面360度方向自由行驶。以适应冰面、沼泽、软沙地及雪地等多情况复杂路面,为科学研究提供稳定可靠的平台。








